Aerospace Controls Laboratory
Home
People
Projects
Publications
Contact
Prof. Jonathan How
ACL Admin Assistant
MIT AeroAstro
YouTube Channel
GitHub
ACL Wiki (internal)
Safety and Predictability in Robot Navigation for Last-Mile Delivery
Physics-Informed Evidential Traversability Learning
Evidential Traversability Learning
Constraint-Aware Refinement for Safety Verification of Neural Feedback Loops
Global Localization via Open-Set Object Mapping and Alignment
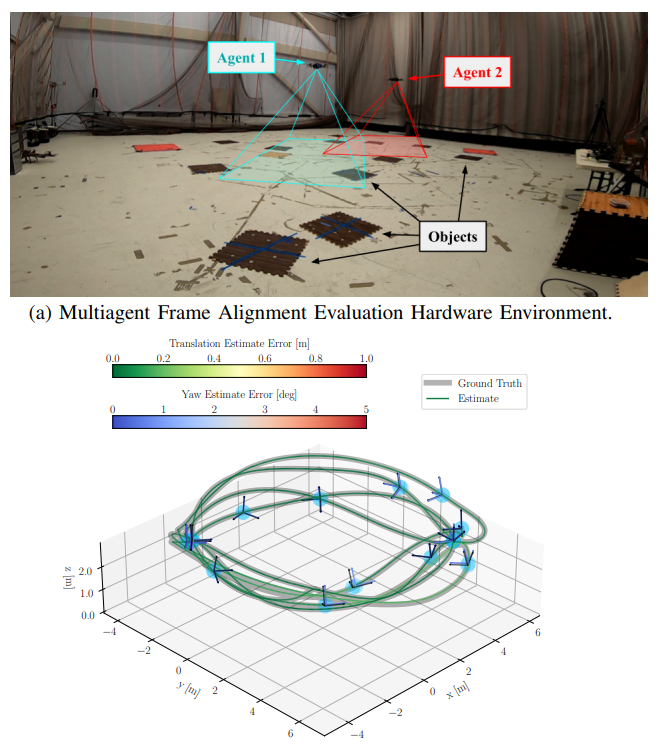
Fully Decentralized Uncertainty-aware Multiagent Trajectory Planner with Real-time Image Segmentation-based Frame Alignment
Communication Delay Robust Multi-Agent Trajectory Planning in Dynamic Environments
Online Reachability Analysis for Systems Subject to Uncertain Disturbances
Risk-Aware Mapping and Planning
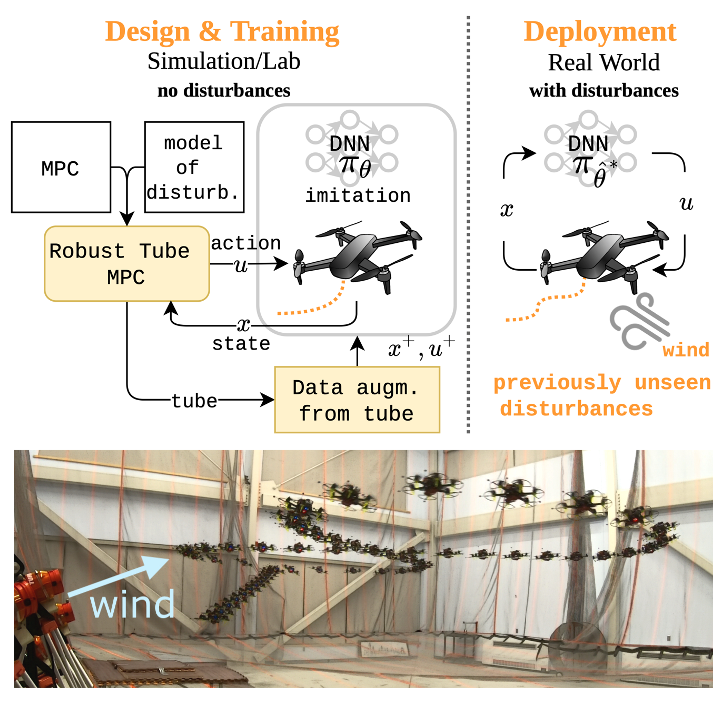
Efficient Learning of Neural Network Policies via Imitation Learning and Tube MPC
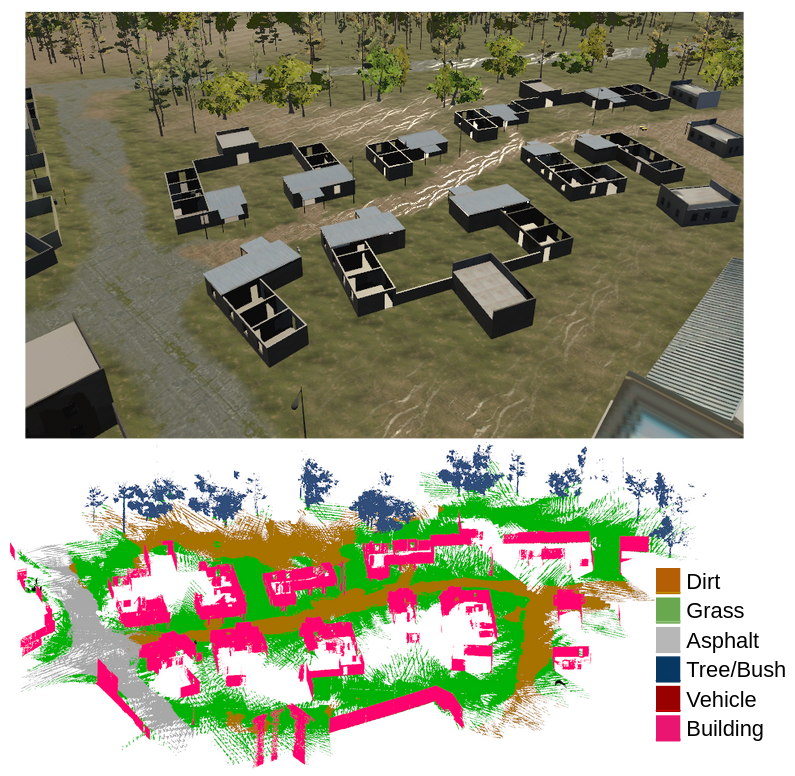
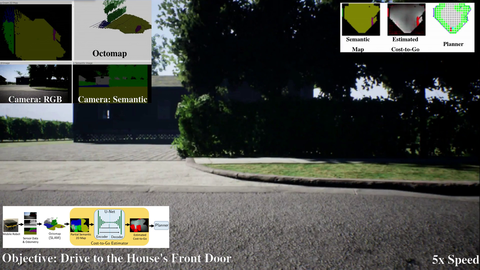
Risk-Aware Off-Road Navigation Leveraging Semantics
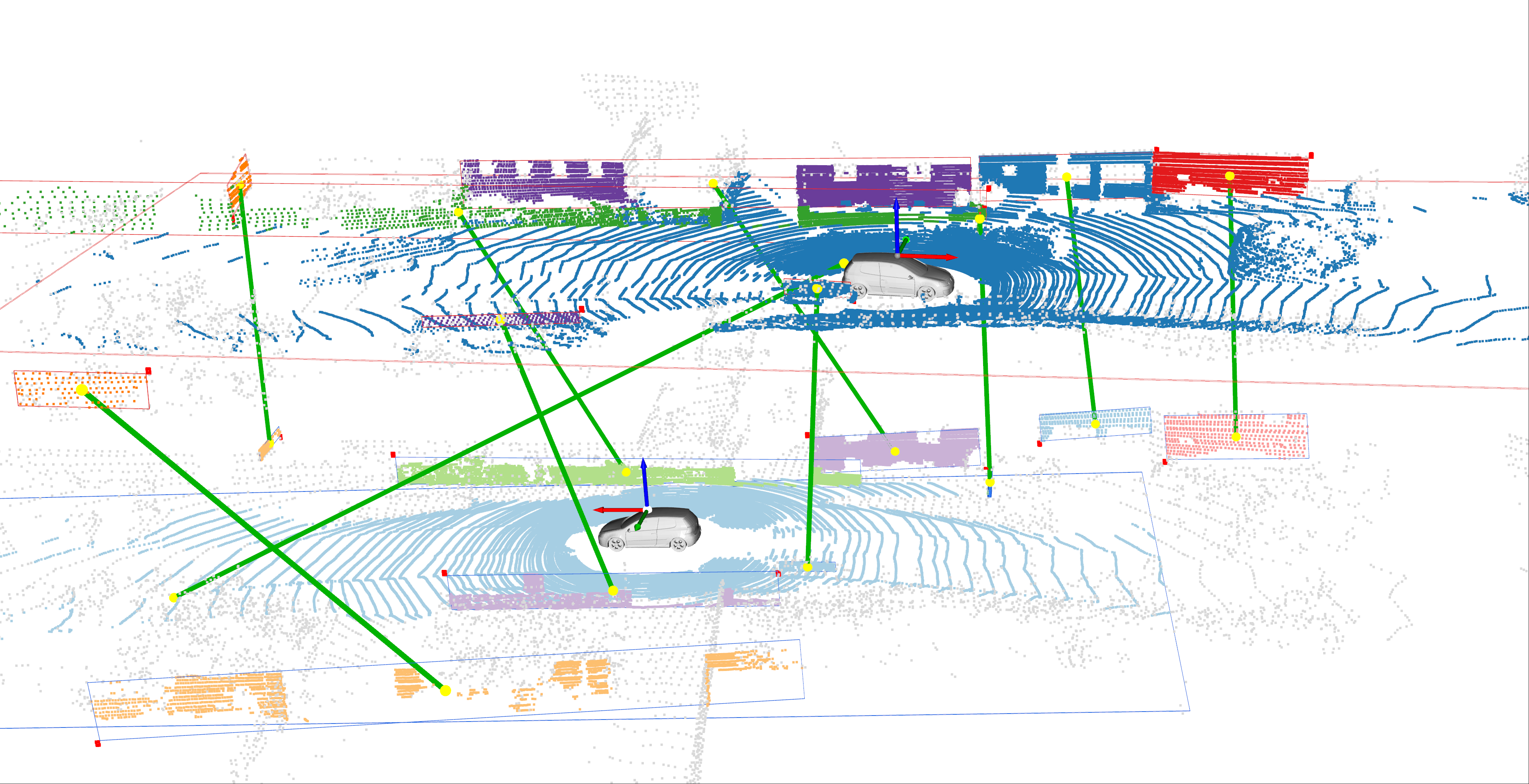
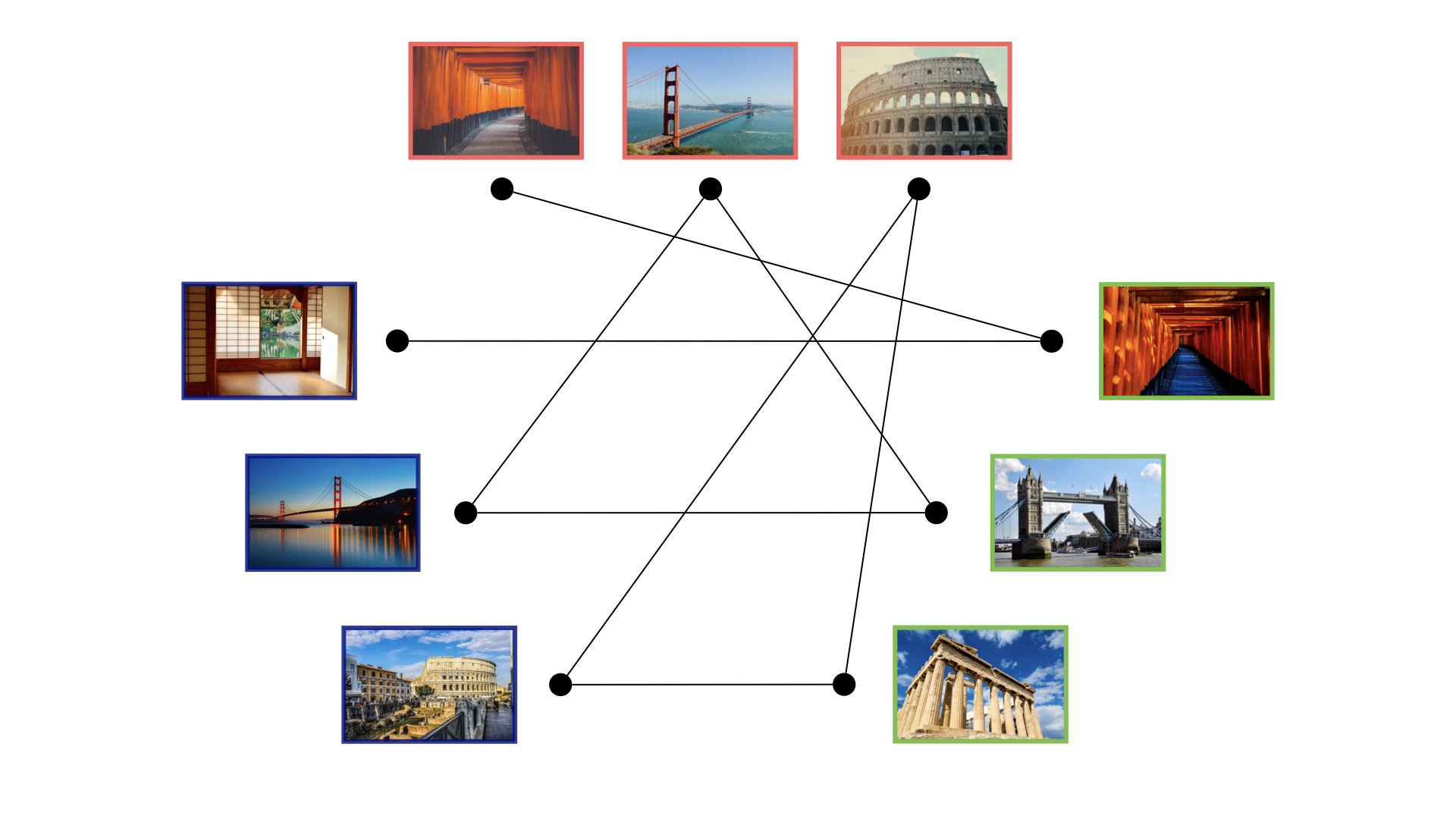
Global Matching of 3D Geometric Landmarks
Multi-Robot Information Gathering
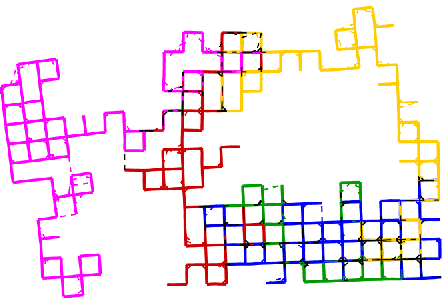
Distributed Metric-Semantic SLAM
Distributed Pose Graph Optimization
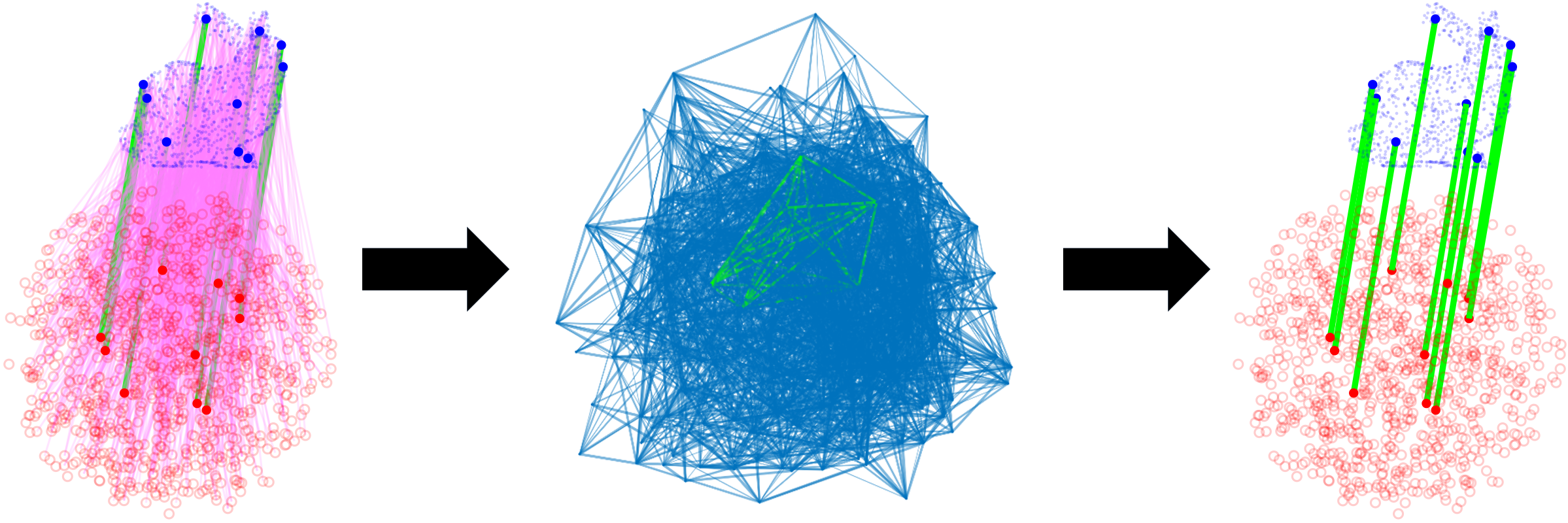
Graph-Theoretic Robust Data Association
Collaborative SLAM for Facilitating Radiological Search and Mapping on a Multi-agent Aerial Platform
Amazon Research Awards-Multiagent Reinforcement Learning
Uncertainty-Aware Motion-Planning for Partially-Observable Systems
Perception-Aware Trajectory Planning in Dynamic Environments
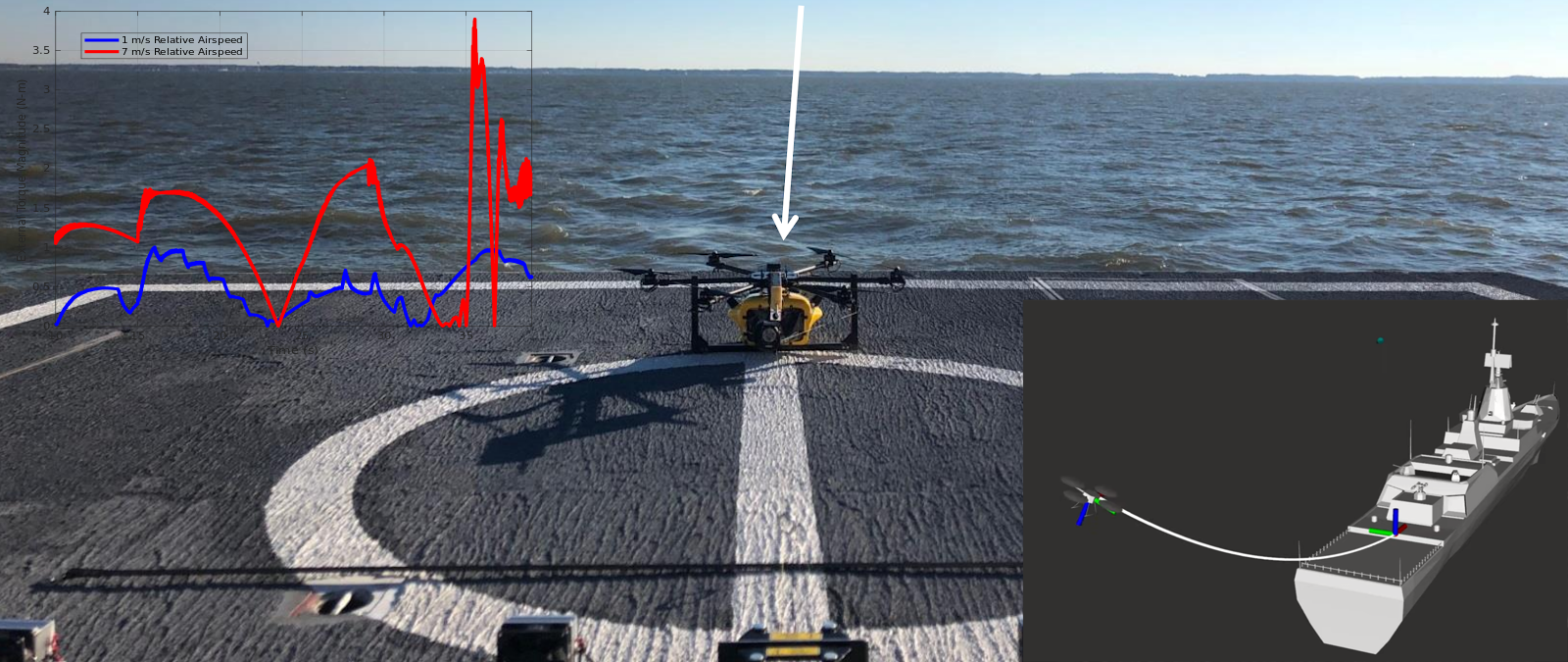
Ship Airwake Measurement System
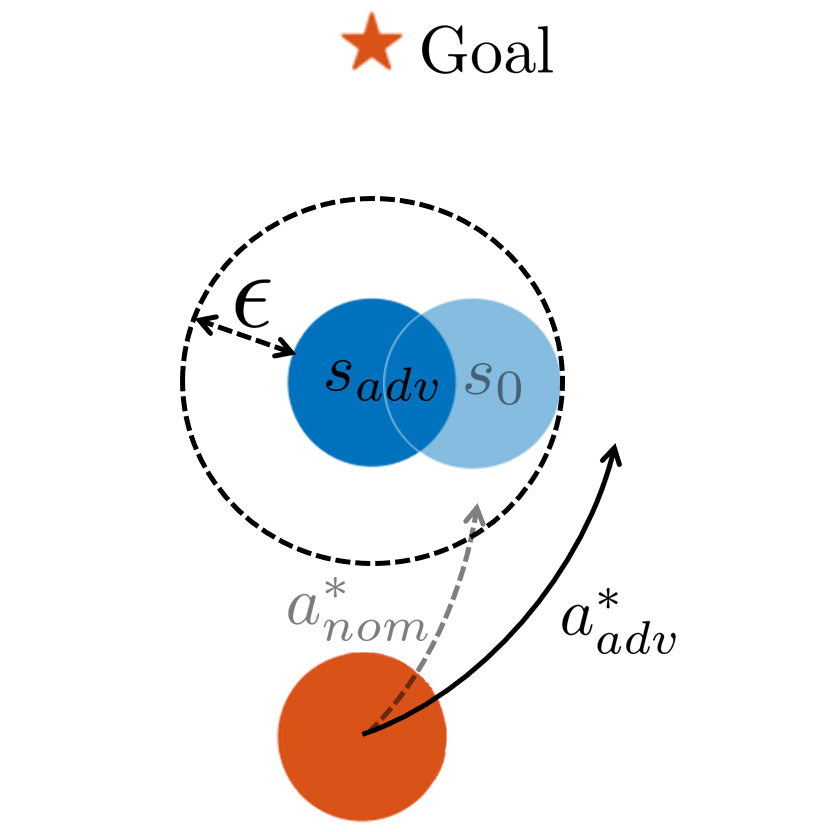
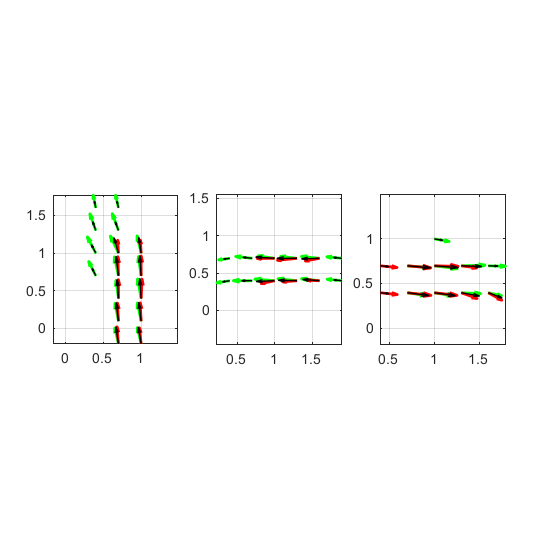
Certified Adversarial Robustness for Deep RL
Lidar-Inertial Observability-Aware Navigator
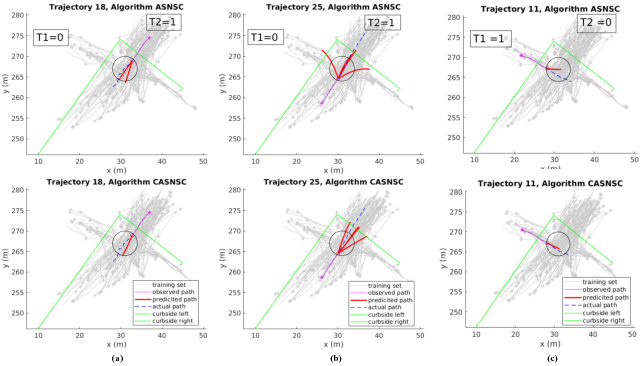
Incremental Learning of Motion Primitives for Pedestrian Trajectory Prediction at Intersections
Self-Driving Delivery Robot
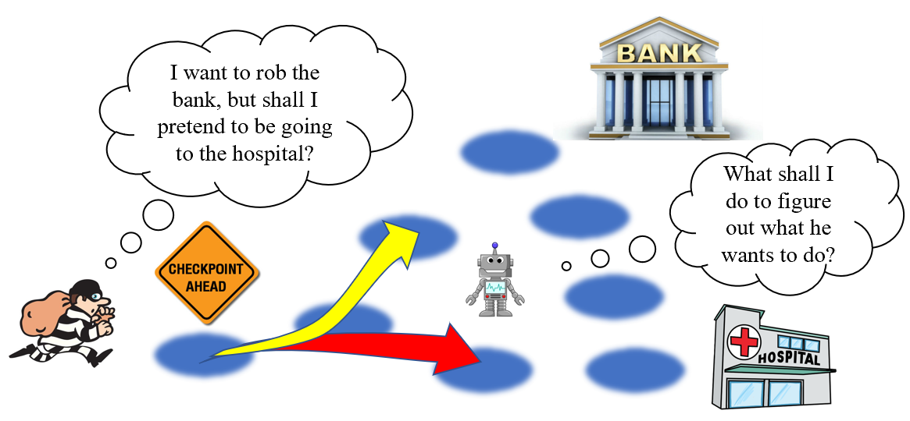
Context-aware Active Perception in Multi-agent Asymmetric Information Games
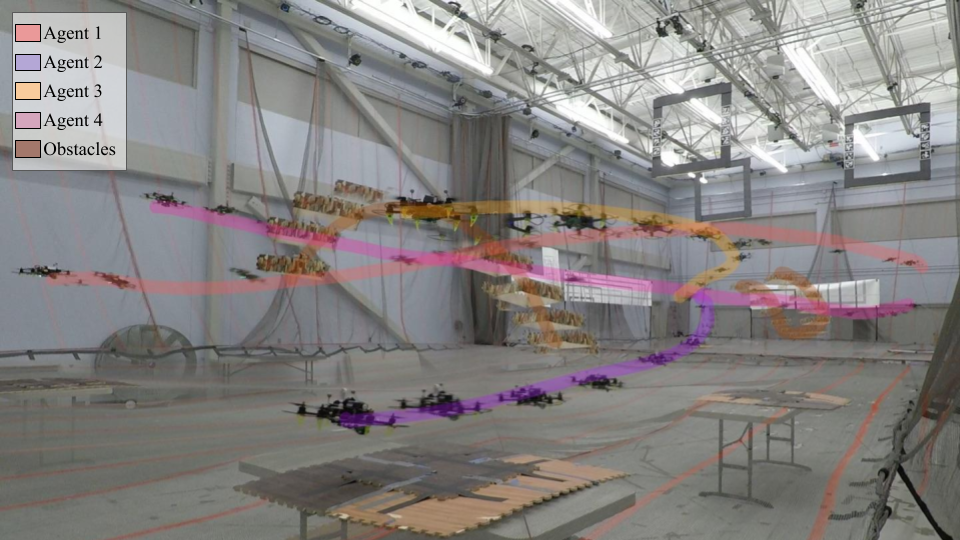
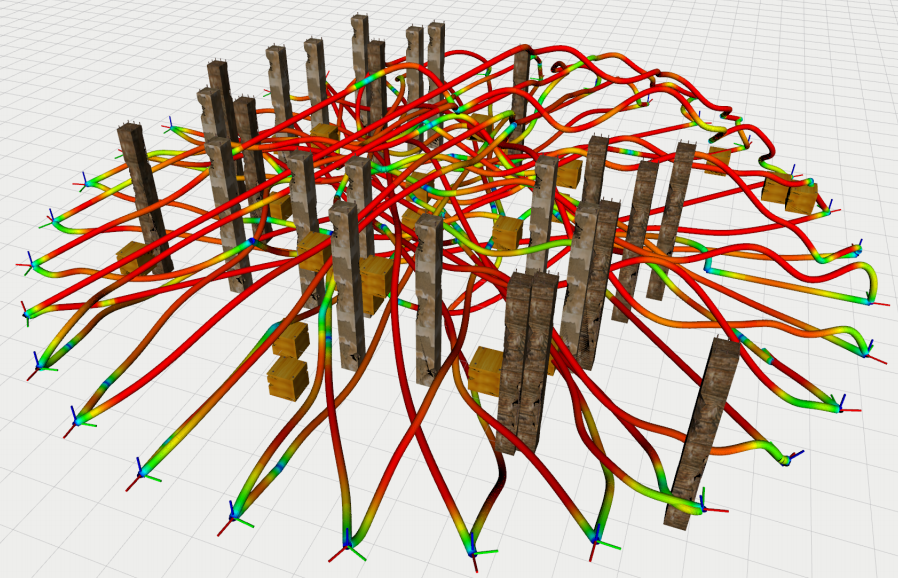
Multi-Agent Trajectory Planning
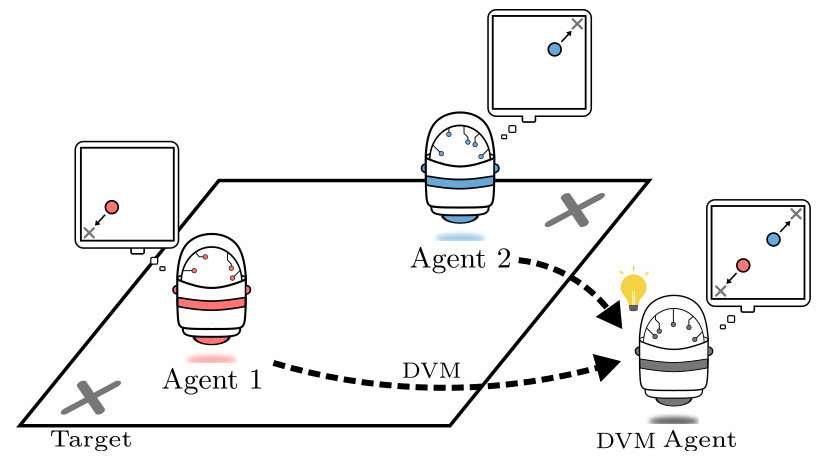
Sharing in Multiagent Reinforcement Learning
Socially Acceptable Navigation
Co-Robotic Scientific Exploration of the Oceans
Robust and Interpretable RL for Navigation in Pedestrian Crowds
Search and Rescue under the Forest Canopy using Multiple UAS
Resource-aware collaborative SLAM
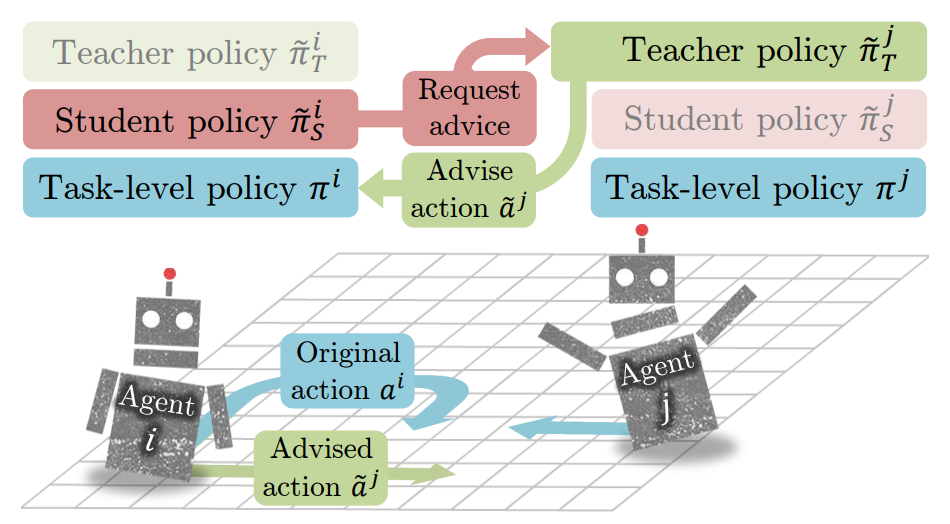
Learning to Teach in Cooperative MARL
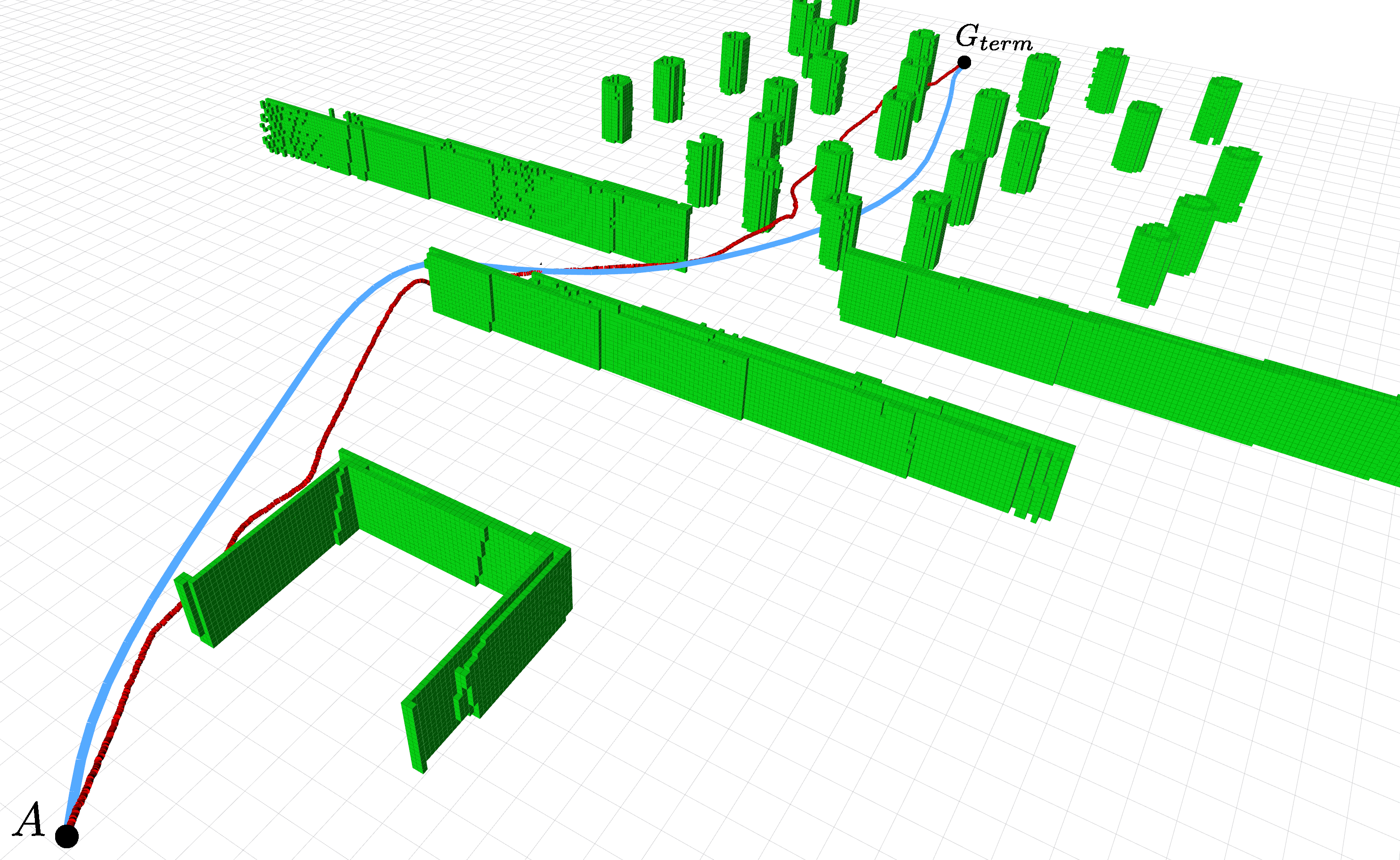
Real-time Planning and Obstacle Avoidance for UAVs
Context Based Pedestrian Intent Recognition
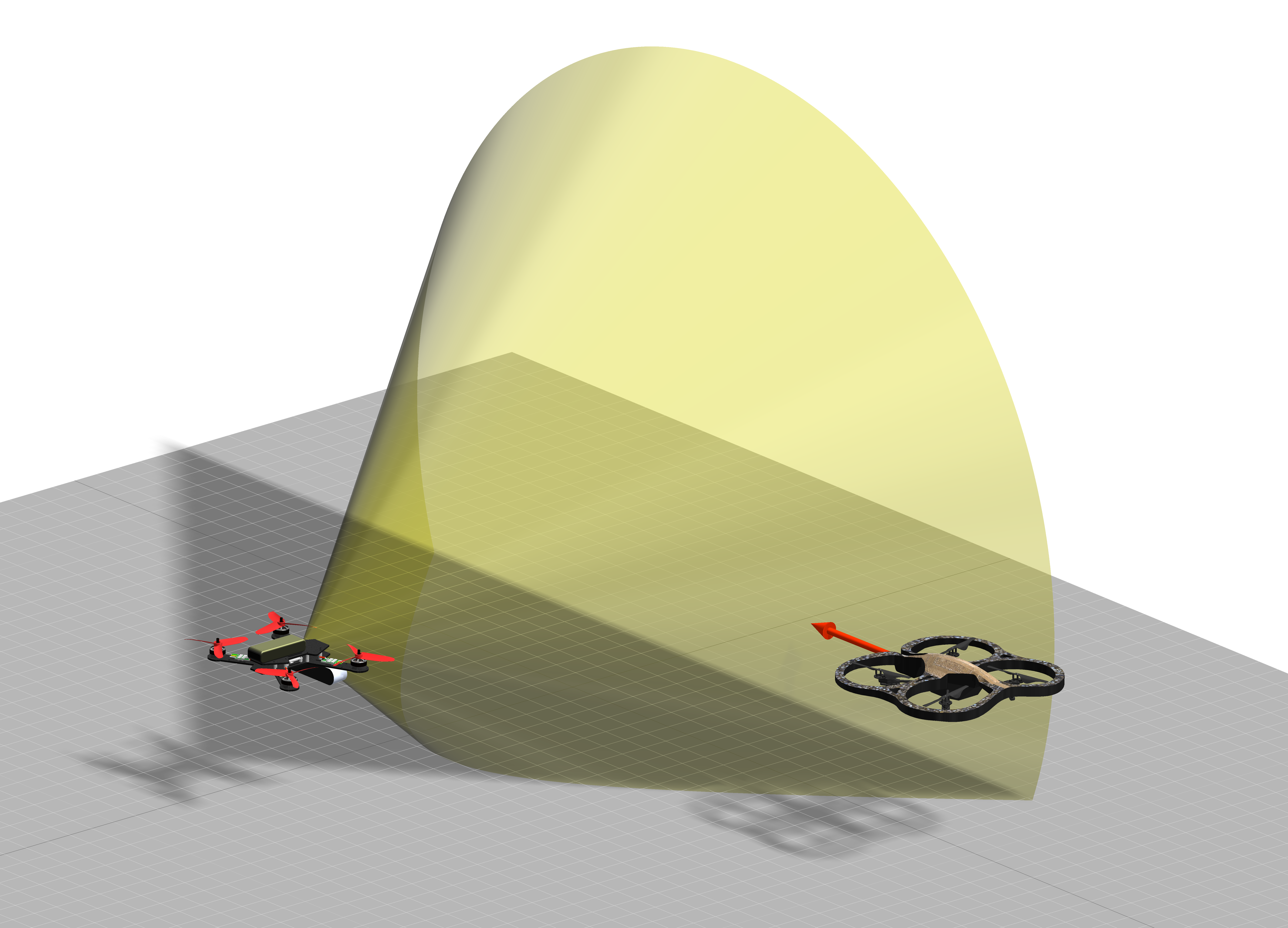
Onboard Detection and Localization of UAVs Using Depth Maps
Integrated Drone Station
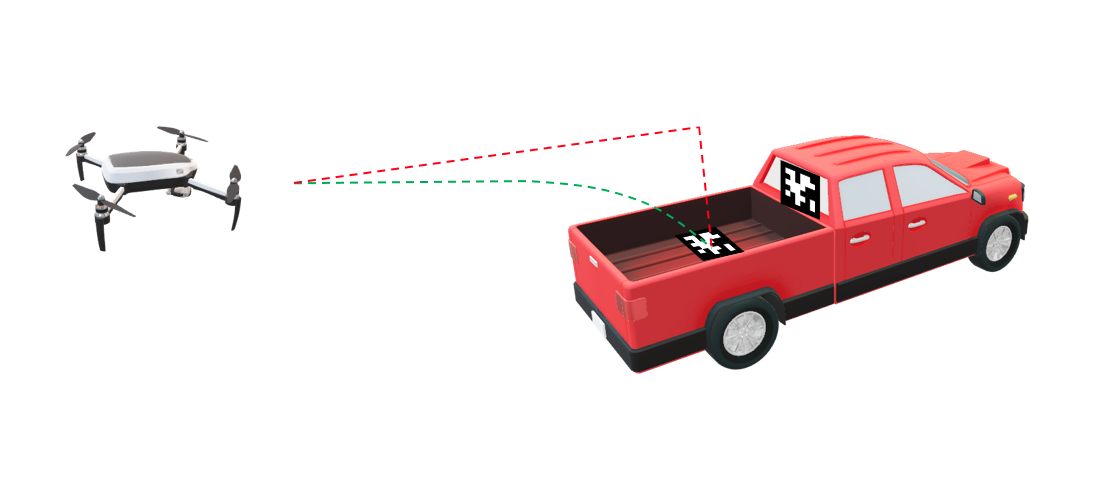
Agile Plate Transport with a Hexacopter with Canted Motors
Previous projects
Backward Reachability for Neural Feedback Loops
A Transferable Pedestrian Motion Prediction Model for Intersections with Different Geometries
Crossmodal Attentive Skill Learner
Decentralized Multi-task Learning
Near-Optimal Adversarial Policy Switching for Decentralized Asynchronous Multi-Agent Systems
Online threat assessment for highway driving scenarios
Planning with Limited Communication Networks
Truncated Bayesian Nonparametrics
Autonomy for Mobility on Demand
Predictive Motion Modeling
Decentralized Control of Multi-Robot Partially Observable Markov Decision Processes using Belief Space Macro-actions
Decoupled Multi-agent Path Planning
Indoor Fixed-Wing Aerobatics
Measurable Augmented Reality for Prototyping Cyber-Physical Systems (MAR-CPS)
Reinforcement Learning via Multi-Fidelity Simulators (MFRL)
Variable-Pitch Quadrotor
Multi-Vehicle Health Management
Automated Battery Management System for Enabling Multi-Agent Persistent Missions
Closed-Loop Control of Autonomous Spacecraft
Autonomous Air Combat
Information-Rich Path Planning for Constrained Mobile Sensor Networks
Gradient Projection Anti-windup Scheme
Coordinated Search and Track (CSAT)
Decentralized Exploration Under Communication Constraints
Coordinated Control of Multiple Mobile Observing Platforms for Weather Forecast Improvement
Consensus-Based Bundle Algorithm (CBBA)
Flight Experiments Using Mixed-Integer Linear Programming (MILP) Trajectory Optimization
Decentralized Exploration under Communication Constraints
Mitigation of the Impact of Sensing Noise on the Precise Formation Flying Control Problem