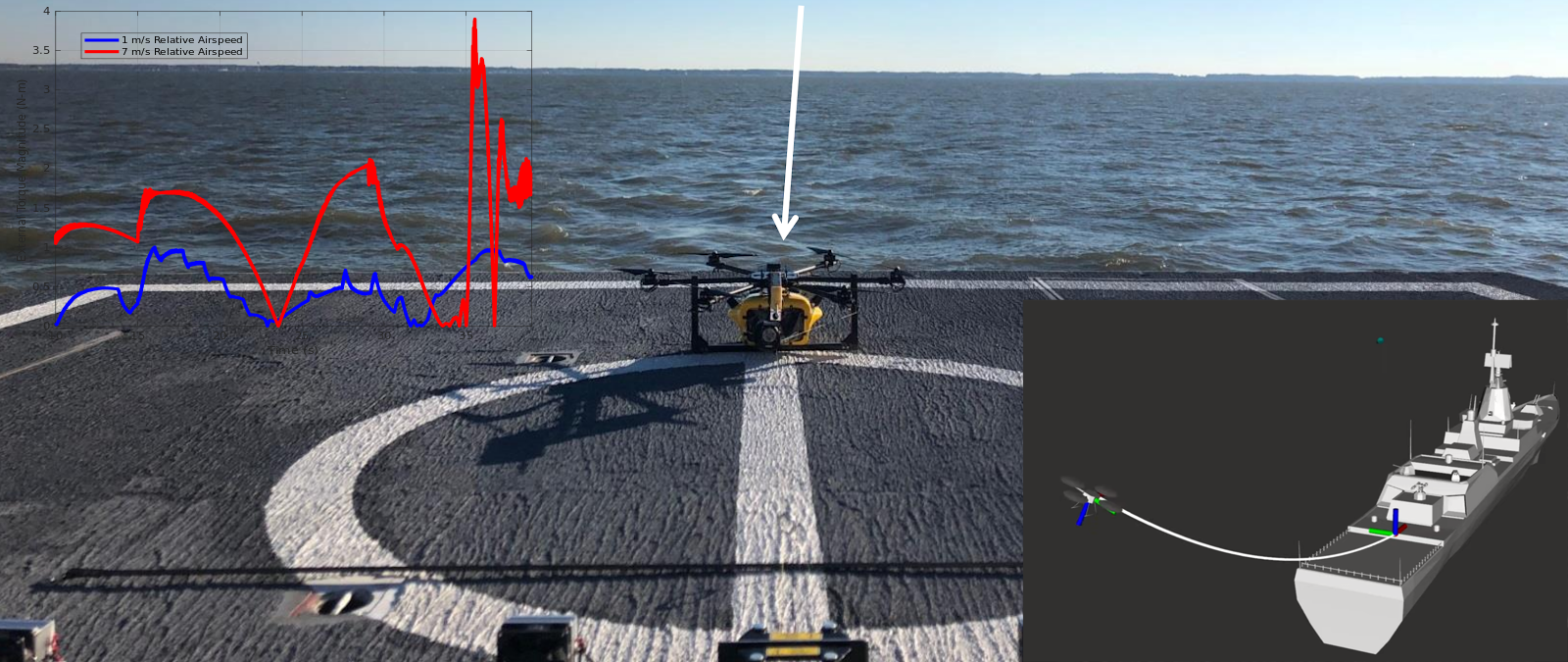
This project was founded on the concept of using a small, unmanned air vehicle (UAV) to collect location-based air flow data behind a moving ship in the interest of characterizing aerodynamic inefficiencies for improvements in maritime ship design. Tethered flight, where the UAV is effectively towed behind the moving vessel, is desirable both for keeping the UAV within a safe distance as well as facilitating recovery in the event of an accident. That being said, tethered flight presents its own challenges in terms of flight control and stability. Moreover, accurate relative state estimation between the UAV and the ship in an outdoor and globally dynamic environment is imperative for the collected air flow data to be useful.
Over the past several months, efforts have been made to develop a working flight system prototype from the ground up that is suitable for tethered flight and reliable outdoor state estimation, along with a comprehensive simulation environment for extensive algorithm development and testing. The proposed solution encompasses all of the following concepts and tools:
In all, the project is a sizable engineering undertaking which requires not only the development of robust tools for demonstrable and repeatable real-world performance, but also the creative application and synthesis of state-of-the-art algorithms and hardware to address the unique challenges of the dynamic maritime environment. Deployment of the complete flight system is slotted to occur in August of 2020.