Shayegan Omidshafiei, Ali-akbar Ahga-mohammadi, Christopher Amato, Shih-Yuan Liu, Miao Liu
This work focuses on solving multi-robot planning problems in continuous spaces with partial observability given a high-level domain description. Decentralized Partially Observable Markov Decision Processes (Dec-POMDPs) are general models for multi-robot coordination problems. However, representing and solving Dec-POMDPs is often intractable for large problems.
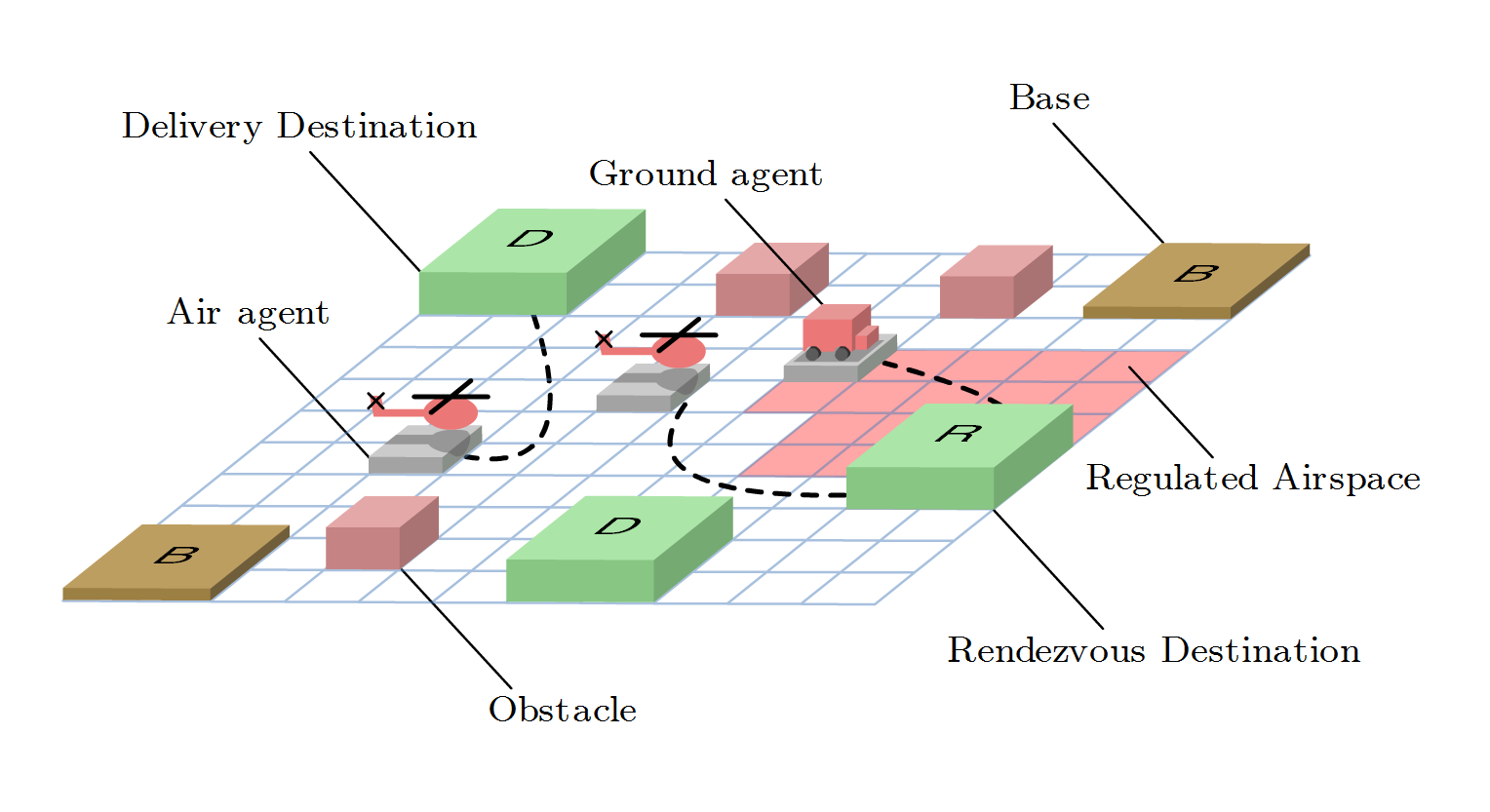
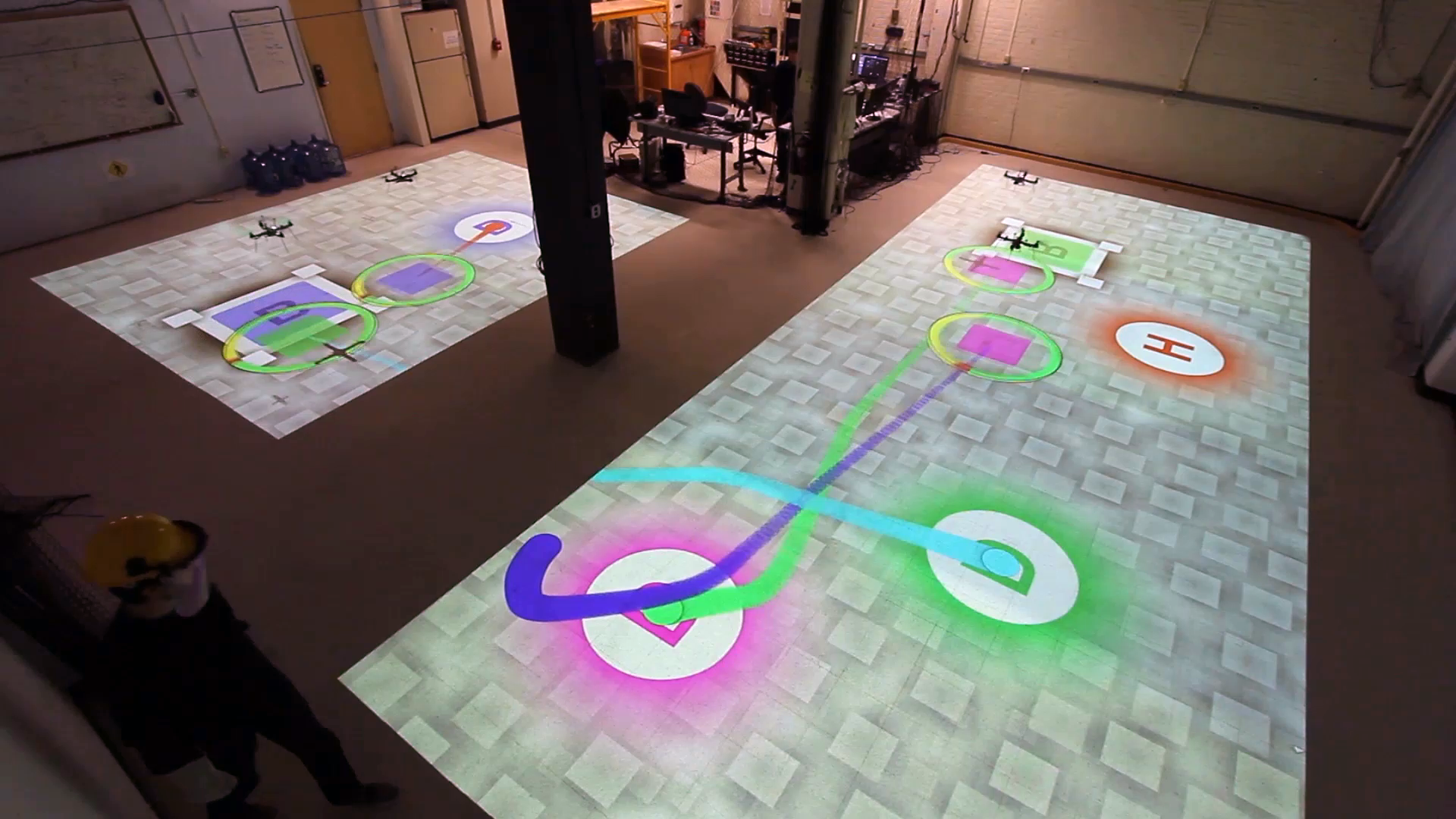
This work extends the Dec-POMDP model to the Decentralized Partially Observable Semi-Markov Decision Process (Dec-POSMDP) to take advantage of high-level representations that are natural for multi-robot problems and to facilitate scalable solutions to large discrete and continuous problems. The Dec-POSMDP formulation uses task macro-actions created from lower-level primitive actions that allow asynchronous decision-making, which is crucial in multi-robot domains. We also present algorithms for solving Dec-POSMDPs, which are more scalable than previous methods since they can incorporate closed-loop belief space macro-actions in planning. The proposed algorithms are then evaluated on a complex multi-robot package delivery problem under uncertainty, showing that our approach can naturally represent realistic domains and provide high-quality solutions for large-scale problems.