Tuna Toksoz, Buddy Michini, Josh Redding, N. Kemal Ure, Girish Chowdhary
Unmanned Aerial Vehicles (UAVs) have become very popular in the past decade. Given their low cost of construction and reduced cost of failure, they are now widely used in a variety of missions, such as surveillance, search and rescue. In particular, there is an important class of these missions that falls under the category of persistent missions, such as Persistent Search & Tracking (PST), where the length of the mission is much longer than the flight time of a single agent.
Currently, the flight-time of a UAV is usually limited by the battery life, and a human operator is often involved in the battery management process. To automate the process, various research groups have proposed methods for autonomous recharging the battery on board. However, recharging the batteries on board is time consuming, which inevitably leads to low vehicle utilization (approximately 30% flight time and 70% recharge time). In order to achieve the same level of capability, more agents must be introduced while the others are charging, which increases the overhead cost of mission and chances of failure.
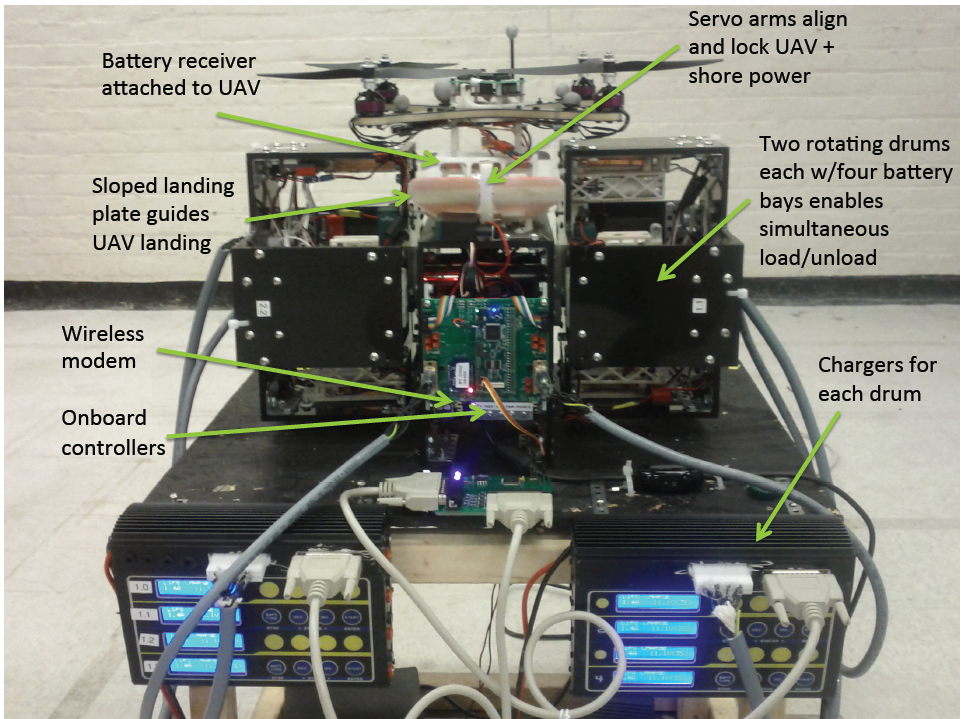
This project aims to improve vehicle utilization in persistent missions. We have developed a platform that automated battery swaps without shutting down the vehicle. The platform holds a buffer of seven batteries in a dual drum structure for time-efficient swapping. Each battery is connected to a proprietary charger that ensures proper battery handling (balanced charging and proper storage). In this manner, we achieved vehicle utility rate of more than 90%. The platform has been demonstrated to be efficient and robust through many experiments. It is capable of supporting three hour long missions with more than 90 autonomous swaps.
3 Hours Persistent Search and Track Mission with Autonomous RechargeStation - April, 2012
Persistent Search and Track Mission with Automated Battery Swap - June, 2011
Consecutive Automated Battery Swaps - January, 2011
Previous Work on Autonomous Recharge - 2009