|
Shayegan Omidshafiei
Alum
Website
shayegan [at] mit [dot] edu
|
|
|
Sharing in Multiagent Reinforcement Learning
Samir Wadhwania,
Dong-Ki Kim,
Shayegan Omidshafiei,
2019
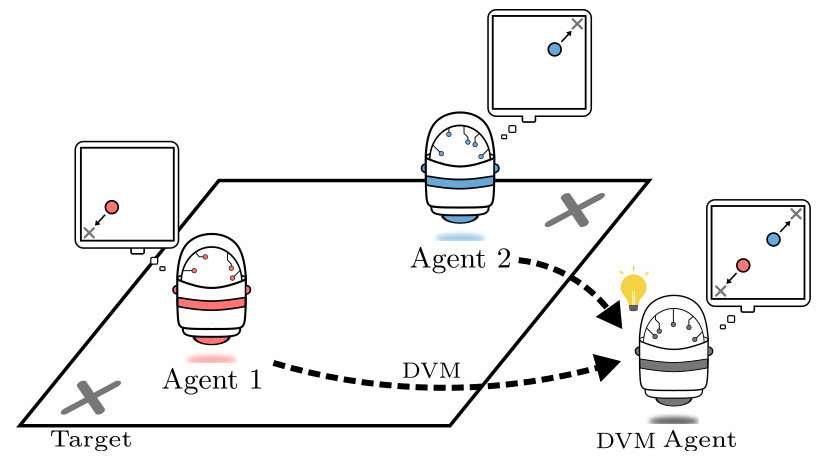
Sharing information during learning in multiagent environments can reduce the need for each agent to explore the entire state space, leading to reduced learning time.
|
|
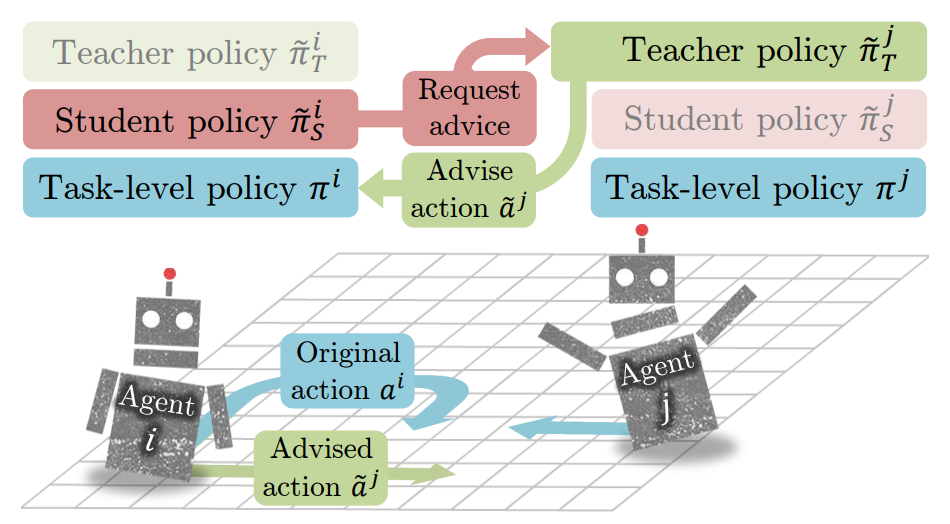
Learning to Teach in Cooperative MARL
Dong-Ki Kim,
Shayegan Omidshafiei,
2018
Our algorithm, Learning to Coordinate and Teach Reinforcement (LeCTR), addresses peer-to-peer teaching in cooperative multiagent reinforcement learning.
|
|
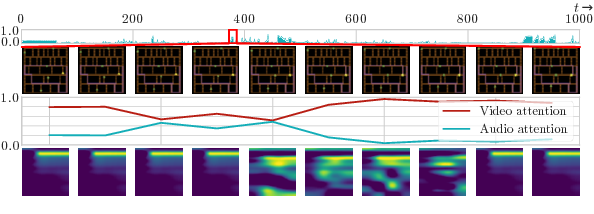
Crossmodal Attentive Skill Learner
Shayegan Omidshafiei,
Dong-Ki Kim,
2018
This work introduces the crossmodal learning paradigm and addresses the problem of learning in a high-dimensional domain with multiple sensory inputs.
|
|
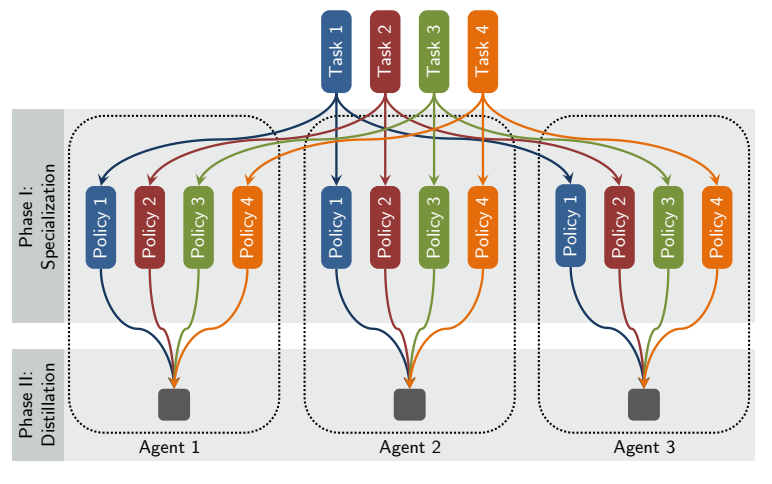
Decentralized Multi-task Learning
Shayegan Omidshafiei,
2018
This work formalizes and addresses the problem of multi-task multiagent reinforcement learning under partial observability.
|
|
Decentralized Control of Multi-Robot Partially Observable Markov Decision Processes using Belief Space Macro-actions
Shayegan Omidshafiei,
Ali-akbar Ahga-mohammadi,
Christopher Amato,
Shih-Yuan Liu,
Miao Liu,
2014
This work extends the Dec-POMDP model to the Decentralized Partially Observable Semi-Markov Decision Process (Dec-POSMDP) to take advantage of high-level representations that are natural for multi-robot problems and to facilitate scalable solutions to large discrete and continuous problems.
|

|
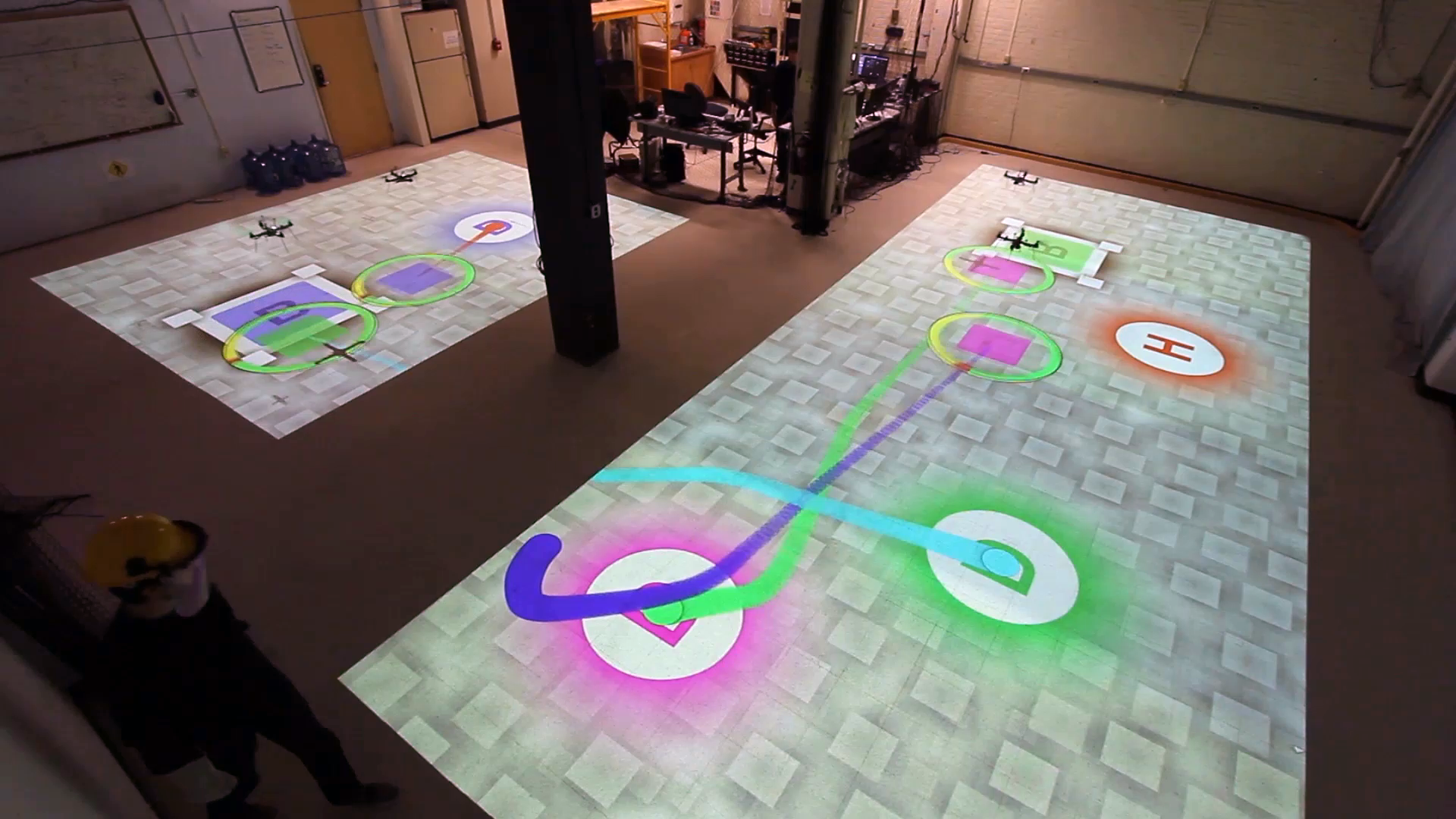
Measurable Augmented Reality for Prototyping Cyber-Physical Systems (MAR-CPS)
Shayegan Omidshafiei,
Ali-akbar Ahga-mohammadi,
Steven Chen,
N. Kemal Ure,
2014
We propose a platform designed to transform indoor laboratories into controlled simulations of outdoor environments.
|
|