|
Ali-akbar Ahga-mohammadi
Alum
aliagha [at] mit [dot] edu
32-D569
|
|
-
Ph.D. in Computer Engineering, Texas A&M University, 2013
-
M.S. in Electrical Engineering (Control Systems), K.N. Toosi OofTech, 2008
-
B.S. in Electrical Engineering (Control Systems), Tabriz University, 2005
|
-
Planning and Conrol Under Uncertainty
-
Decision Making and Stochastic Control in Information Space
-
Robotics and CyberPhysical Systems
-
Estimation and Filtering Theory
|

|
Lidar-Inertial Observability-Aware Navigator
Andrea Tagliabue,
Jesus Tordesillas Torres,
Xiaoyi (Jeremy) Cai,
Ali-akbar Ahga-mohammadi,
2020
This work presents the Lidar-Inertial Observability-Aware Navigator used at the DARPA Subt. challenge.
|
|
Decentralized Control of Multi-Robot Partially Observable Markov Decision Processes using Belief Space Macro-actions
Shayegan Omidshafiei,
Ali-akbar Ahga-mohammadi,
Christopher Amato,
Shih-Yuan Liu,
Miao Liu,
2014
This work extends the Dec-POMDP model to the Decentralized Partially Observable Semi-Markov Decision Process (Dec-POSMDP) to take advantage of high-level representations that are natural for multi-robot problems and to facilitate scalable solutions to large discrete and continuous problems.
|

|
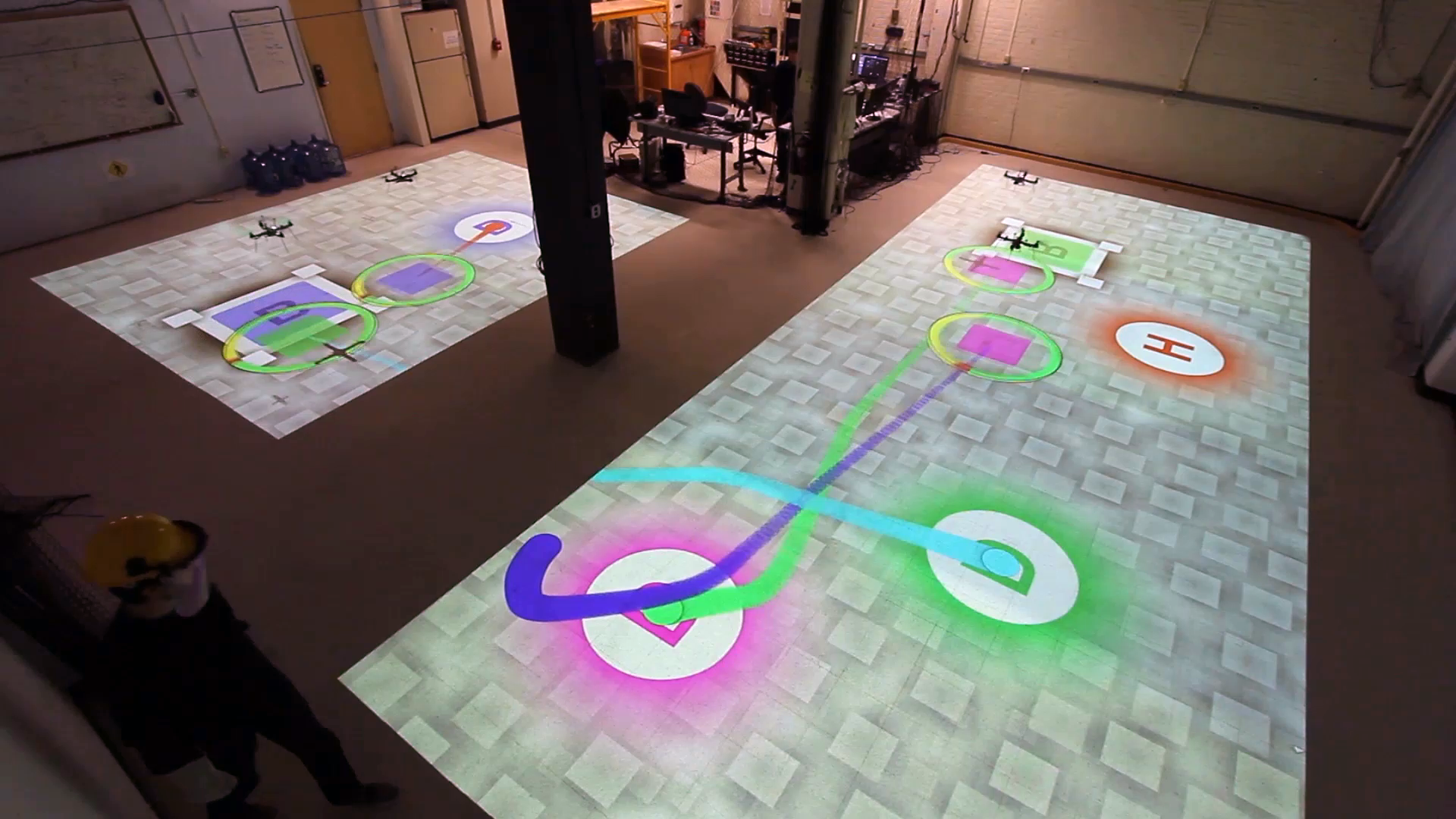
Measurable Augmented Reality for Prototyping Cyber-Physical Systems (MAR-CPS)
Shayegan Omidshafiei,
Ali-akbar Ahga-mohammadi,
Steven Chen,
N. Kemal Ure,
2014
We propose a platform designed to transform indoor laboratories into controlled simulations of outdoor environments.
|
|
