Adrian Carrio, Jesus Tordesillas Torres, Sai Vemprala
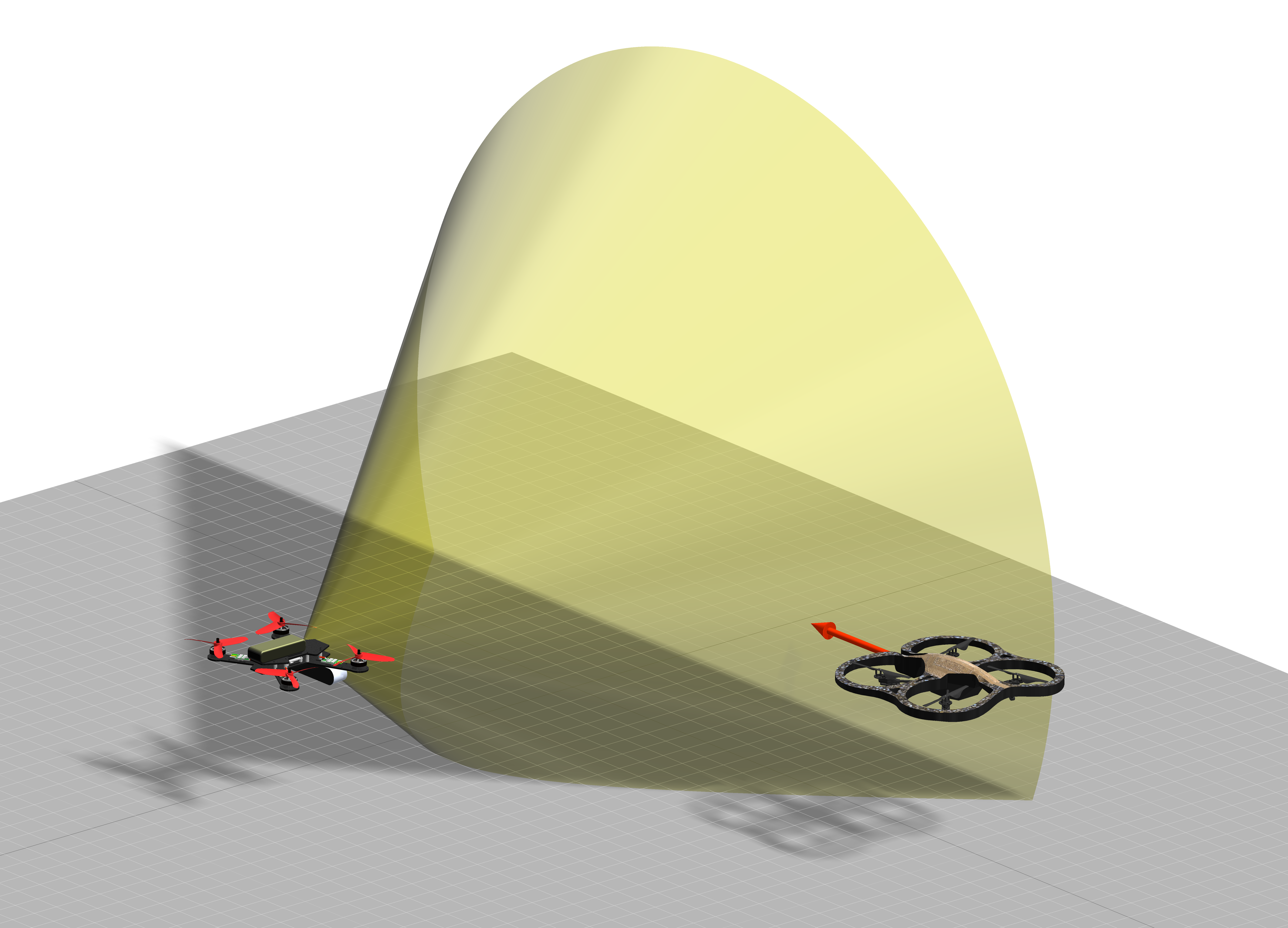
Obstacle avoidance is a key feature for safe UAV navigation. While solutions have been proposed for static obstacle avoidance, systems enabling avoidance of dynamic objects, such as drones, are hard to implement due to the detection range and field-of-view (FOV) requirements, as well as the constraints for integrating such systems on-board small UAVs. In this work, we propose a novel method to perform onboard UAV detection and localization using depth maps. We integrate it on a small UAV and evaluate its performance thoroughly through several flight experiments and show its capability to detect several drones of different sizes and shapes at the same time.
