-
Ph.D. in Aeronautics and Astronautics, MIT, 2019 - current
-
M.S. in Aeronautics and Astronautics, MIT, 2019
-
M.S. in Robotics and Electronics, ETSII-UPM (Spain), 2017
-
B.S. in Robotics and Electronics, ETSII-UPM (Spain), 2016
|
-
Perception-Aware Planning
-
Multi-Agent Trajectory Planning
-
Real-time Planning and Obstacle Avoidance for UAVs
|

|
Perception-Aware Trajectory Planning in Dynamic Environments
Jesus Tordesillas Torres,
2020
This work proposes a real-time perception-aware trajectory planner in dynamic environments.
|

|
Lidar-Inertial Observability-Aware Navigator
Andrea Tagliabue,
Jesus Tordesillas Torres,
Xiaoyi (Jeremy) Cai,
Ali-akbar Ahga-mohammadi,
2020
This work presents the Lidar-Inertial Observability-Aware Navigator used at the DARPA Subt. challenge.
|
|
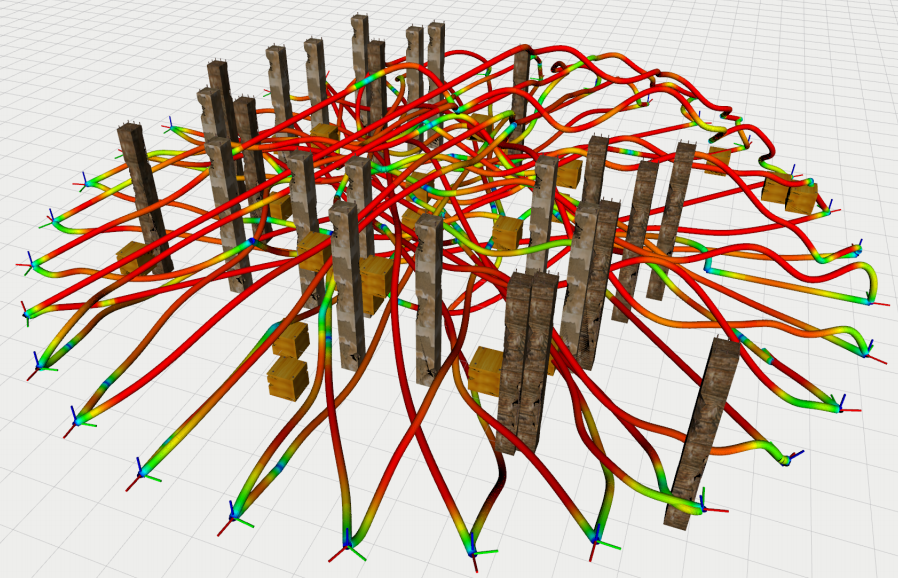
Multi-Agent Trajectory Planning
Jesus Tordesillas Torres,
2019
This work proposes a 3D decentralized and asynchronous multi-agent trajectory planner for UAVs.
|
|
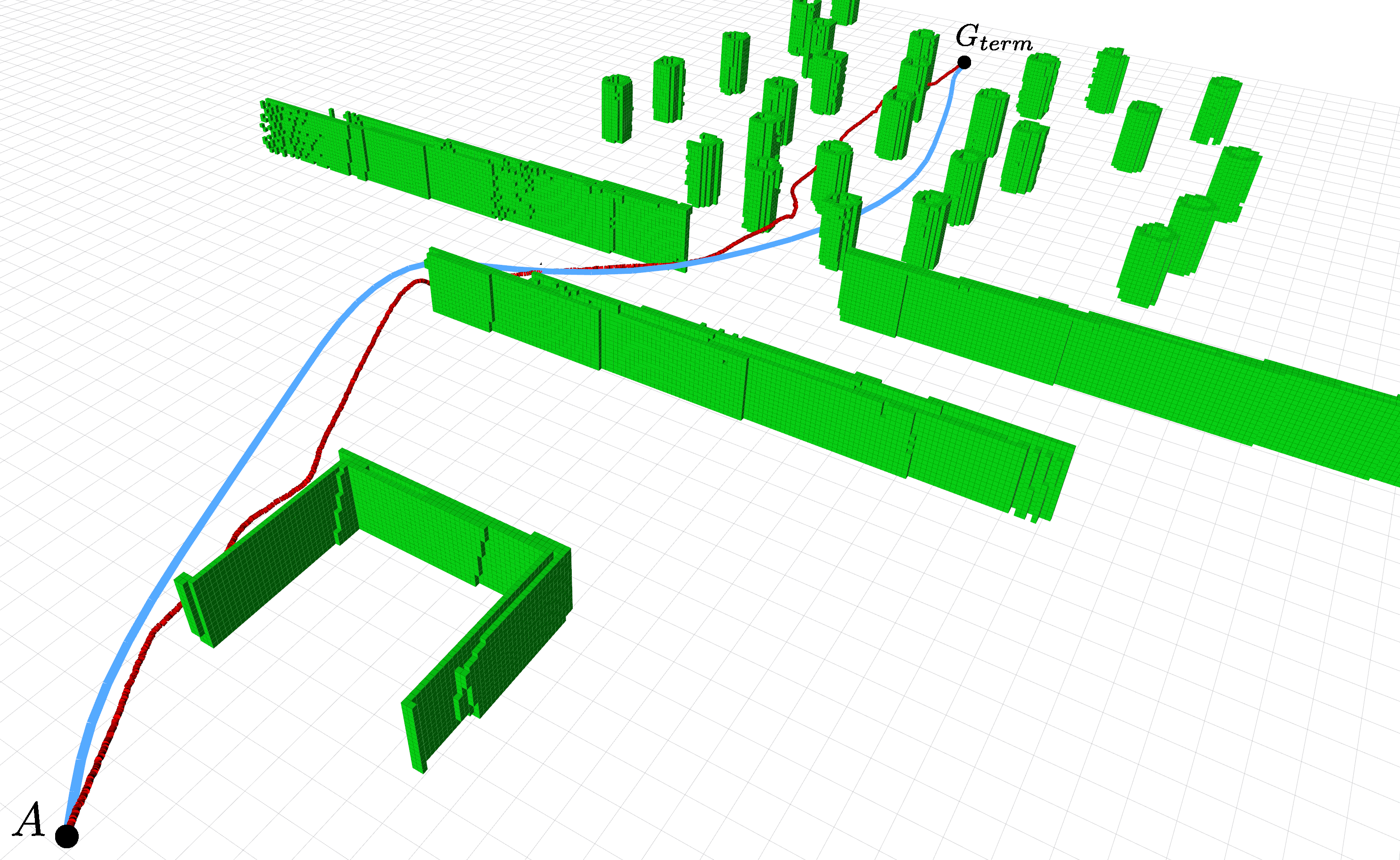
Real-time Planning and Obstacle Avoidance for UAVs
Jesus Tordesillas Torres,
Brett Lopez,
2018
This work proposes a planning framework in which multi-fidelity models are used to reduce the discrepancy between the local and global planner.
|
|
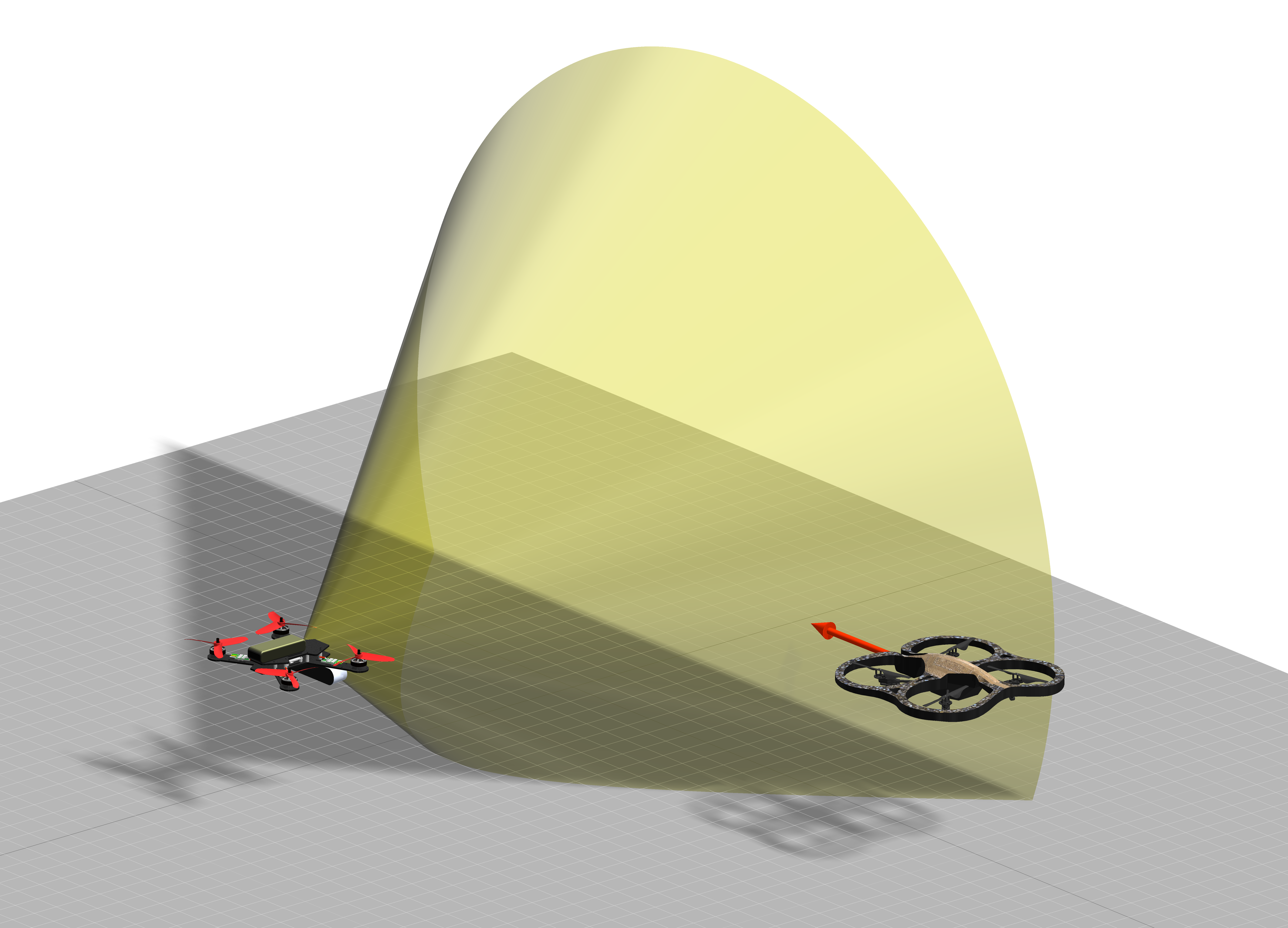
Onboard Detection and Localization of UAVs Using Depth Maps
Adrian Carrio,
Jesus Tordesillas Torres,
Sai Vemprala,
2018
This work proposes the use of depth maps and Deep Learning to detect and localize a UAV from another UAV.
|

|
Agile Plate Transport with a Hexacopter with Canted Motors
Gabriel Bousquet,
Jesus Tordesillas Torres,
Brett Lopez,
2018
This work proposes the use a Hexacopter with canted motors for precise aerial manipulation tasks.
|
|
