|
Autonomy for Mobility on Demand
Justin Miller,
Andres Hasfura,
Shih-Yuan Liu,
2016
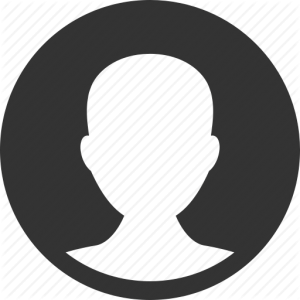
A Mobility on Demand (MOD) research framework has been developed for the MIT campus consisting of GEM electric golf cart shuttles being routed through a passenger ride request app.
|
|
Predictive Motion Modeling
Steven Chen,
Justin Miller,
Miao Liu,
Shih-Yuan Liu,
2015
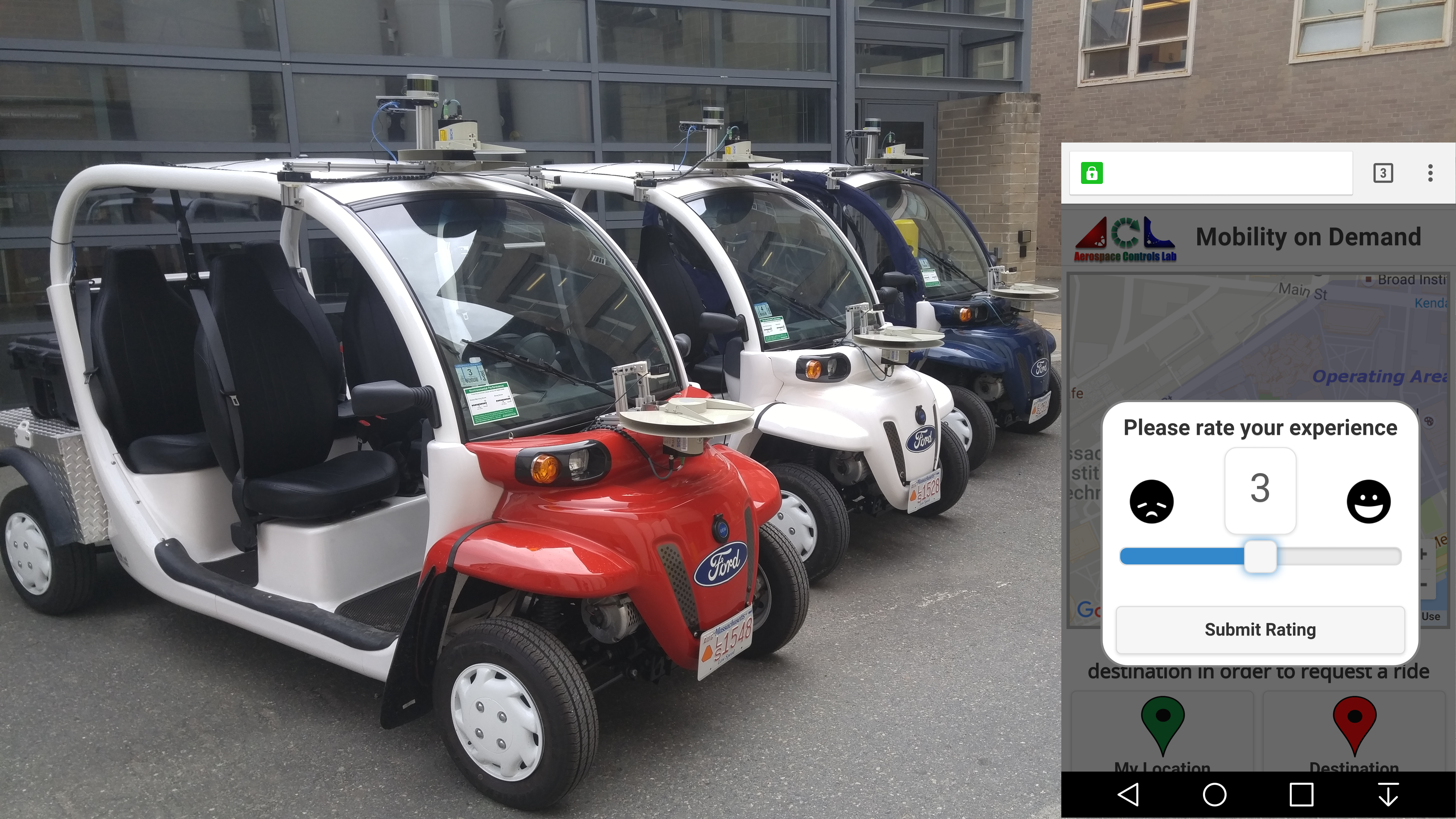
This work develops an algorithm that combines the strengths of the Markovian-based and clustering-based methods, by finding the local clusters characterized by partial trajectory segments, and making predictions using both the local motion models and the global Markovian transition dynamics.
|
|
Decentralized Control of Multi-Robot Partially Observable Markov Decision Processes using Belief Space Macro-actions
Shayegan Omidshafiei,
Ali-akbar Ahga-mohammadi,
Christopher Amato,
Shih-Yuan Liu,
Miao Liu,
2014
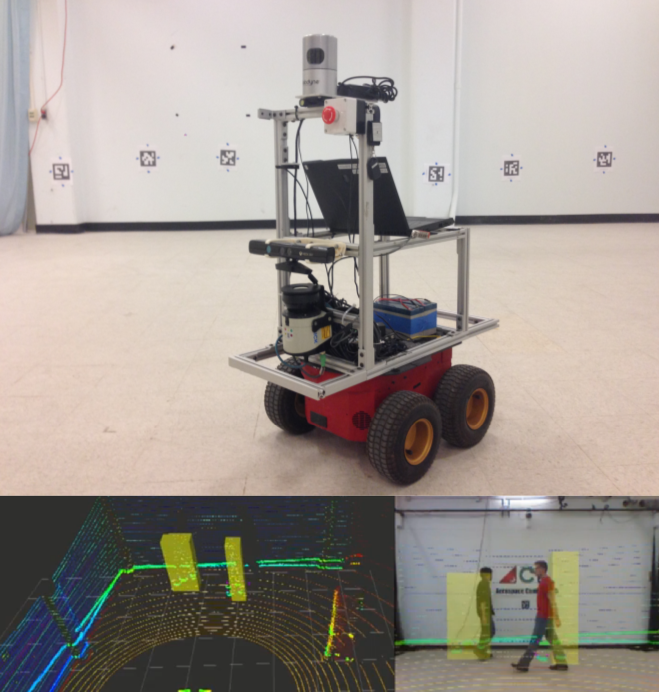
This work extends the Dec-POMDP model to the Decentralized Partially Observable Semi-Markov Decision Process (Dec-POSMDP) to take advantage of high-level representations that are natural for multi-robot problems and to facilitate scalable solutions to large discrete and continuous problems.
|