Autonomous (self-driving) vehicles promise to revolutionize future transportation systems with Mobility on Demand (MOD) systems playing an important role. In MOD systems, customers do not own vehicles, but rather request and receive rides only as needed. A fundamental goal for any MOD system is providing a high customer quality of service in order to minimize any inconveniences that customers may experience when relying on the shared resources.For example, customers requesting a ride may experience long wait times or may reject a service all together if no vehicles are nearby. Success for MOD systems depends on the ability to manage the distribution of MOD vehicles to match customer demand under spatial and temporal fluctuations.
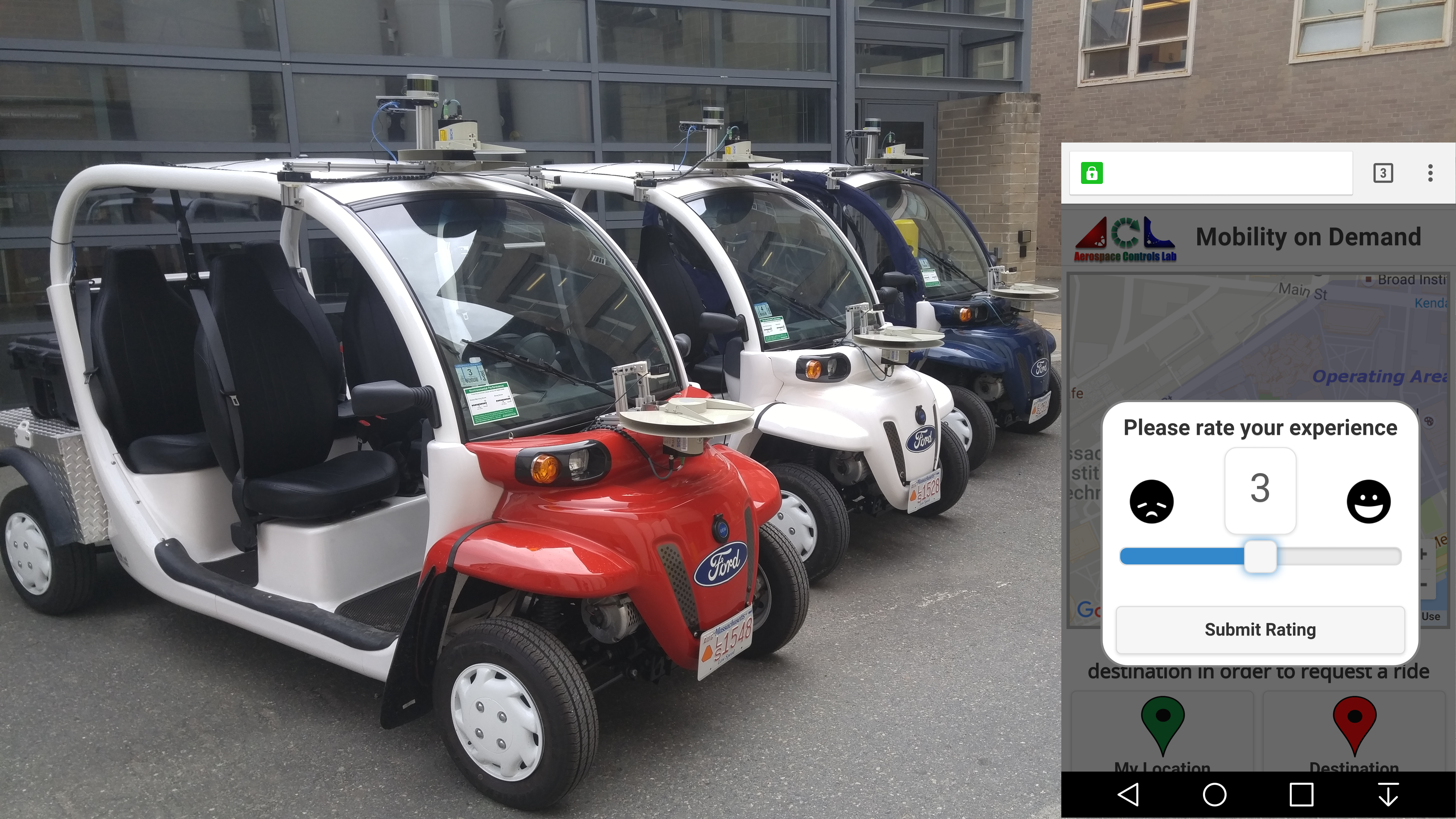
A Mobility on Demand (MOD) research framework has been developed for the MIT campus consisting of GEM electric golf cart shuttles being routed through a passenger ride request app. The shuttles are equipped with a suite of sensors which enable precise localizataion and obstacle detecition. Data collected from the sensors is used to explore research objectives in the fields of pedestrian prediction, path planning, and MOD queuing theory. Additionally, research focuses on vehicles automation in order to perform efficient, yet safe, passenger transportation on campus without the need for human drivers.