|
Michael Everett
Alum
GitHub
/
Website
mfe [at] mit [dot] edu
31-235C
|
|
-
Ph.D. in Mechanical Engineering, MIT, 2020
-
S.M. in Mechanical Engineering, MIT, 2017
-
S.B. in Mechanical Engineering, MIT, 2015
|
-
Robust Learning
-
Collision Avoidance
-
Motion Planning
|

|
Evidential Traversability Learning
Xiaoyi (Jeremy) Cai,
Lakshay Sharma,
Michael Everett,
2024
Uncertainty-aware traversability learning and risk-aware navigation in off-road terrain
|

|
Risk-Aware Mapping and Planning
Lakshay Sharma,
Michael Everett,
Donggun Lee,
Xiaoyi (Jeremy) Cai,
2023
RAMP: A Risk-Aware Mapping and Planning Pipeline for Fast Off-Road Ground Robot Navigation
|
|
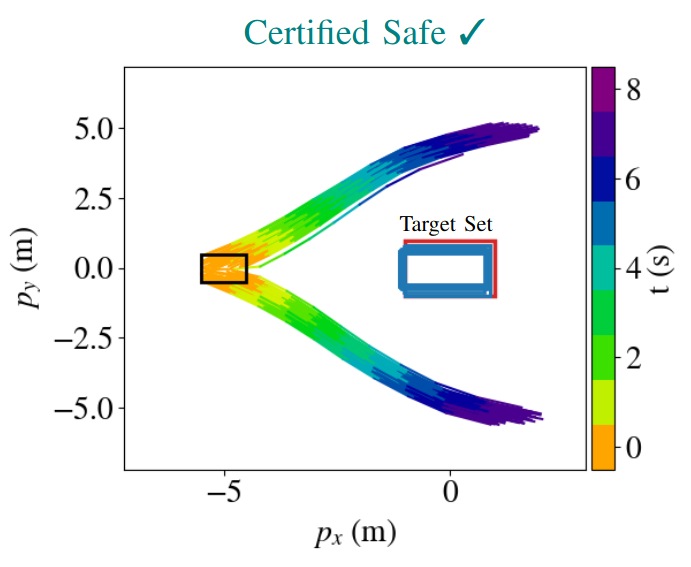
Backward Reachability for Neural Feedback Loops
Nicholas Rober,
Michael Everett,
2022
This project developed a backward reachability strategy to certify safety for systems controlled by neural networks
|
|
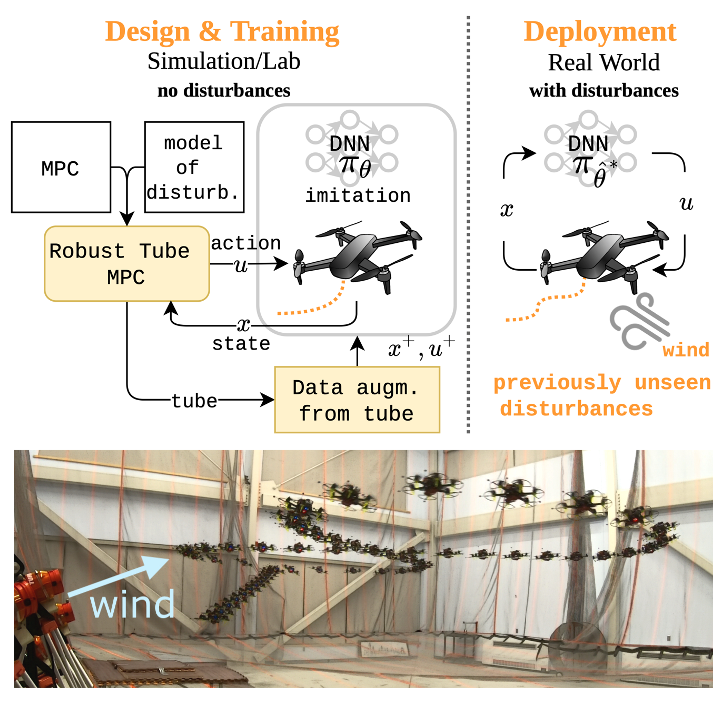
Efficient Learning of Neural Network Policies via Imitation Learning and Tube MPC
Andrea Tagliabue,
Dong-Ki Kim,
Michael Everett,
2022
Use a Robust Tube variant of MPC to efficiently learn Neural Network policies via Imitation Learning.
|

|
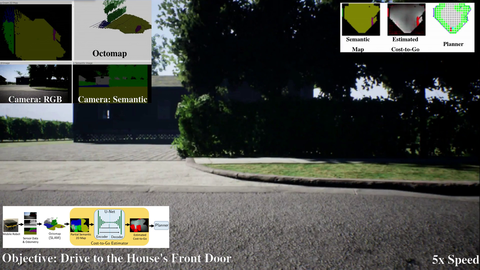
Risk-Aware Off-Road Navigation Leveraging Semantics
Xiaoyi (Jeremy) Cai,
Michael Everett,
2022
Use semantics of the environment to infer terrain traversability based on history of speed data.
|
|
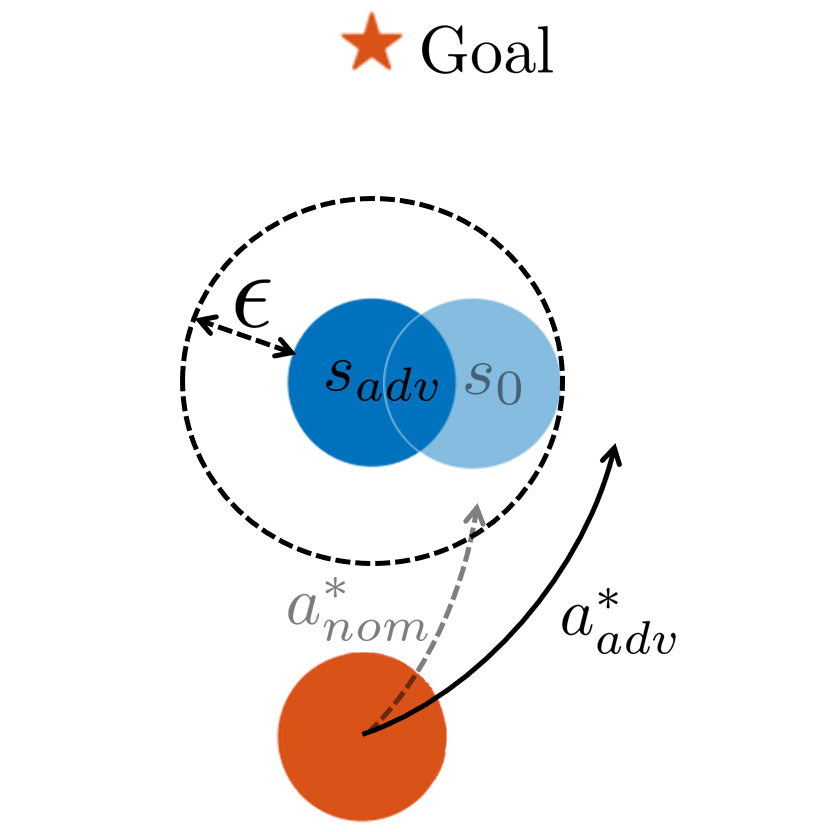
Certified Adversarial Robustness for Deep RL
Michael Everett,
Björn Lütjens,
2020
This project develops deep RL algorithms that are robust to an adversarial perturbation in the observation space
|
|
Self-Driving Delivery Robot
Michael Everett,
Justin Miller (Ford),
2019
This project develops planning algorithms to enable autonomous navigation in the "last 100m" for delivery robots
|

|
Socially Acceptable Navigation
Michael Everett,
Steven Chen,
2019
Collision avoidance algorithm using Deep RL.
|

|
Robust and Interpretable RL for Navigation in Pedestrian Crowds
Björn Lütjens,
Michael Everett,
2018
Deep neural networks can fail overconfidently on novel observations. This work pioneers a reinforcement learning framework that reasons about the predictive confidence and is more robust to novel observations.
|
|
