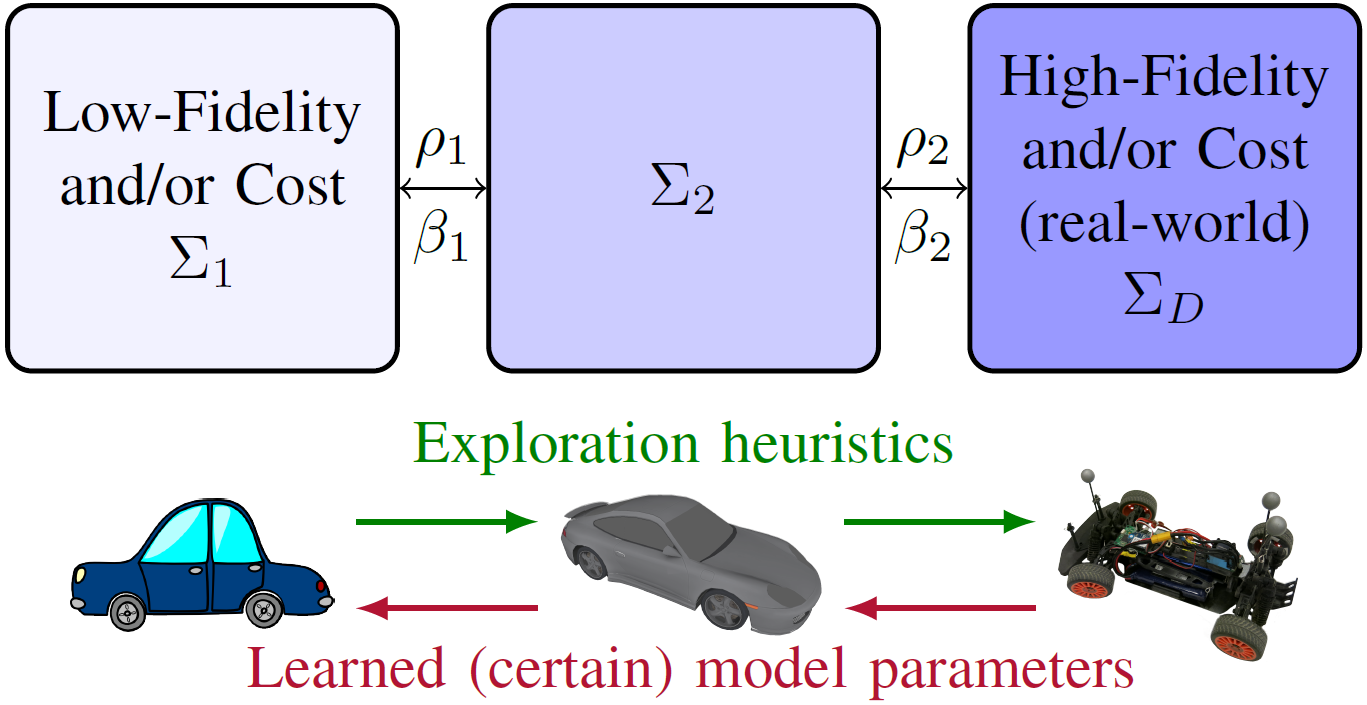
This project presents a framework for efficient RL in a scenario where multiple simulators of a target task are available, each with varying levels of fidelity.
This project aims to develop a variable-pitch quadrotor capable of aggressive aerobatic maneuvers which stretch beyond the current abilities of typical fixed-pitch quadrotors.