|
Steven Chen
Alum
chenyuf2 [at] mit [dot] edu
|
|

|
Socially Acceptable Navigation
Michael Everett,
Steven Chen,
2019
Collision avoidance algorithm using Deep RL.
|
|
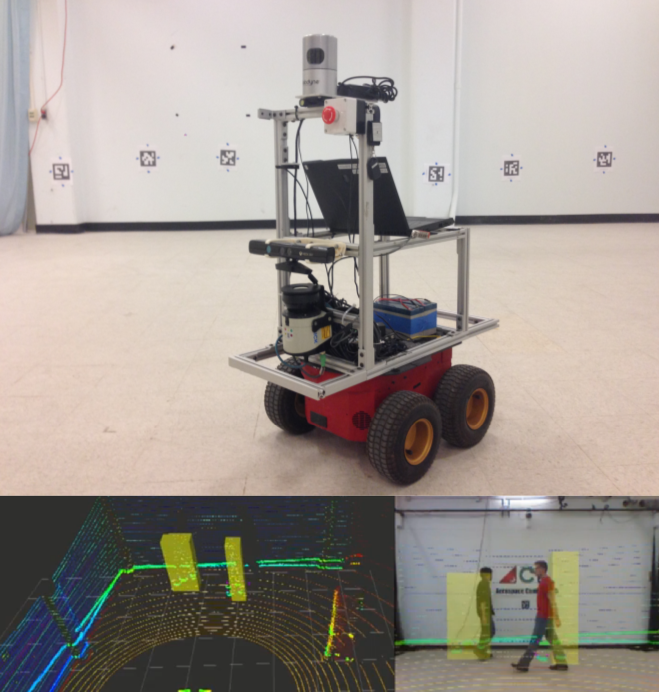
Predictive Motion Modeling
Steven Chen,
Justin Miller,
Miao Liu,
Shih-Yuan Liu,
2015
This work develops an algorithm that combines the strengths of the Markovian-based and clustering-based methods, by finding the local clusters characterized by partial trajectory segments, and making predictions using both the local motion models and the global Markovian transition dynamics.
|

|
Decoupled Multi-agent Path Planning
Steven Chen,
Mark Cutler,
John (Jack) Quindlen,
2014
This project aims to develop a multiagent path planning algorithm that finds collision-free trajectories for a team of mobile robots.
|

|
Measurable Augmented Reality for Prototyping Cyber-Physical Systems (MAR-CPS)
Shayegan Omidshafiei,
Ali-akbar Ahga-mohammadi,
Steven Chen,
N. Kemal Ure,
2014
We propose a platform designed to transform indoor laboratories into controlled simulations of outdoor environments.
|
|