|
Yulun Tian
Alum
Website
yulun [at] mit [dot] edu
31-236B
|
|
-
Ph.D. in Aeronautics and Astronautics, MIT, 2019 - current
-
M.S. in Aeronautics and Astronautics, MIT, 2019
-
B.S. in Computer Science, UC Berkeley, 2017
|
-
Simulatenous Localization and Mapping (SLAM)
-
Distributed Optimization
-
Geometric Optimization
|

|
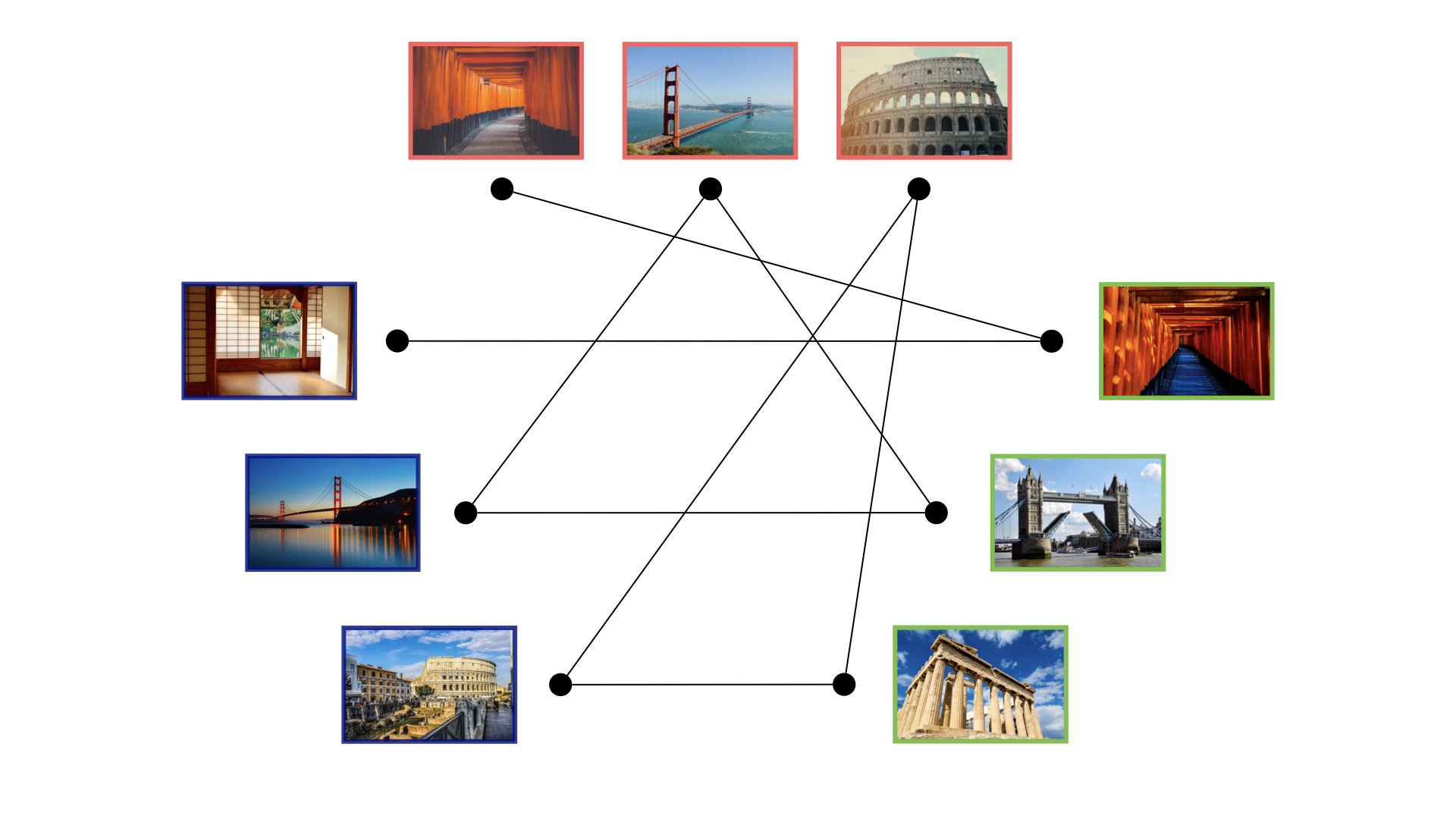
Global Localization via Open-Set Object Mapping and Alignment
Mason Peterson,
Yulun Tian,
Yixuan (Lucas) Jia,
2024
This project presents an outdoor global localization method based on robust registration of open-set segment maps.
|
|
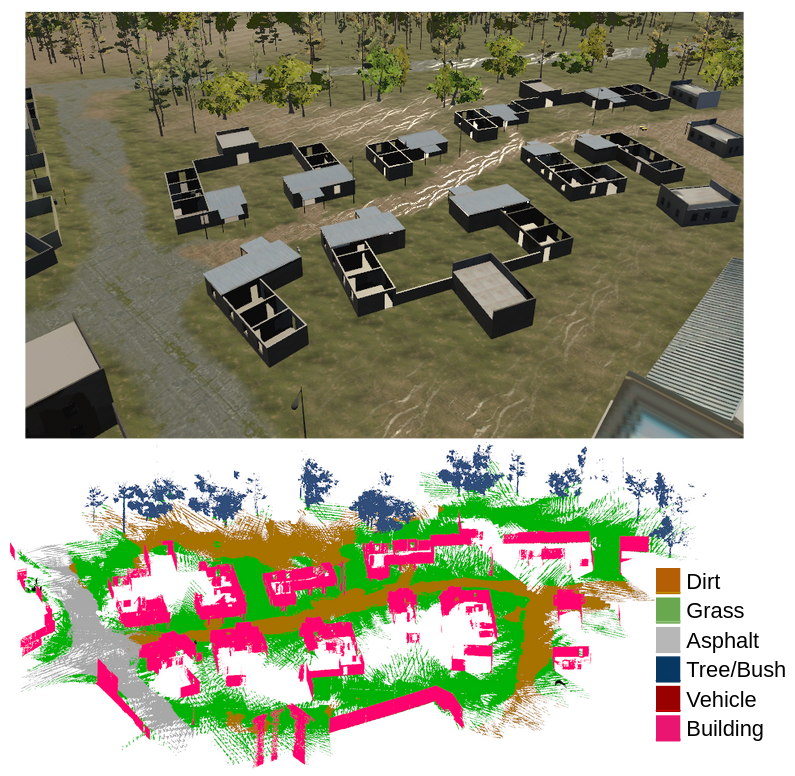
Distributed Metric-Semantic SLAM
Yulun Tian,
2022
We propose a distributed metric-semantic SLAM system.
|
|
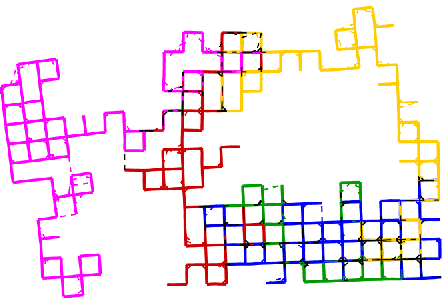
Distributed Pose Graph Optimization
Yulun Tian,
Kasra Khosoussi,
2021
We propose a distributed pose graph optimization algorithm.
|

|
Search and Rescue under the Forest Canopy using Multiple UAS
Yulun Tian,
2018
We describe an experimental evaluation of a multi-vehicle UAS for search and rescue under the forest canopy.
|
|
Resource-aware collaborative SLAM
Yulun Tian,
Kasra Khosoussi,
Matthew Giamou,
2018
This project aims to develop resource-aware algorithms for distributed inter-robot loop closure detection and measurement selection.
|
|