-
M.S. in Electrical and Computer Engineering, Georgia Tech, 2019
-
B.S. in Electrical Engineering, Georgia Tech, 2017
|
-
Field robotics
-
Planning under uncertainty
-
Learning-based navigation
-
Multi-robot planning and control
|
|
Robust Dynamics Generalization in Deep RL
Jimmy Queeney,
Xiaoyi (Jeremy) Cai,
2025
Deep RL framework for adaptive in-distribution and robust out-of-distribution dynamics generalization
|
|
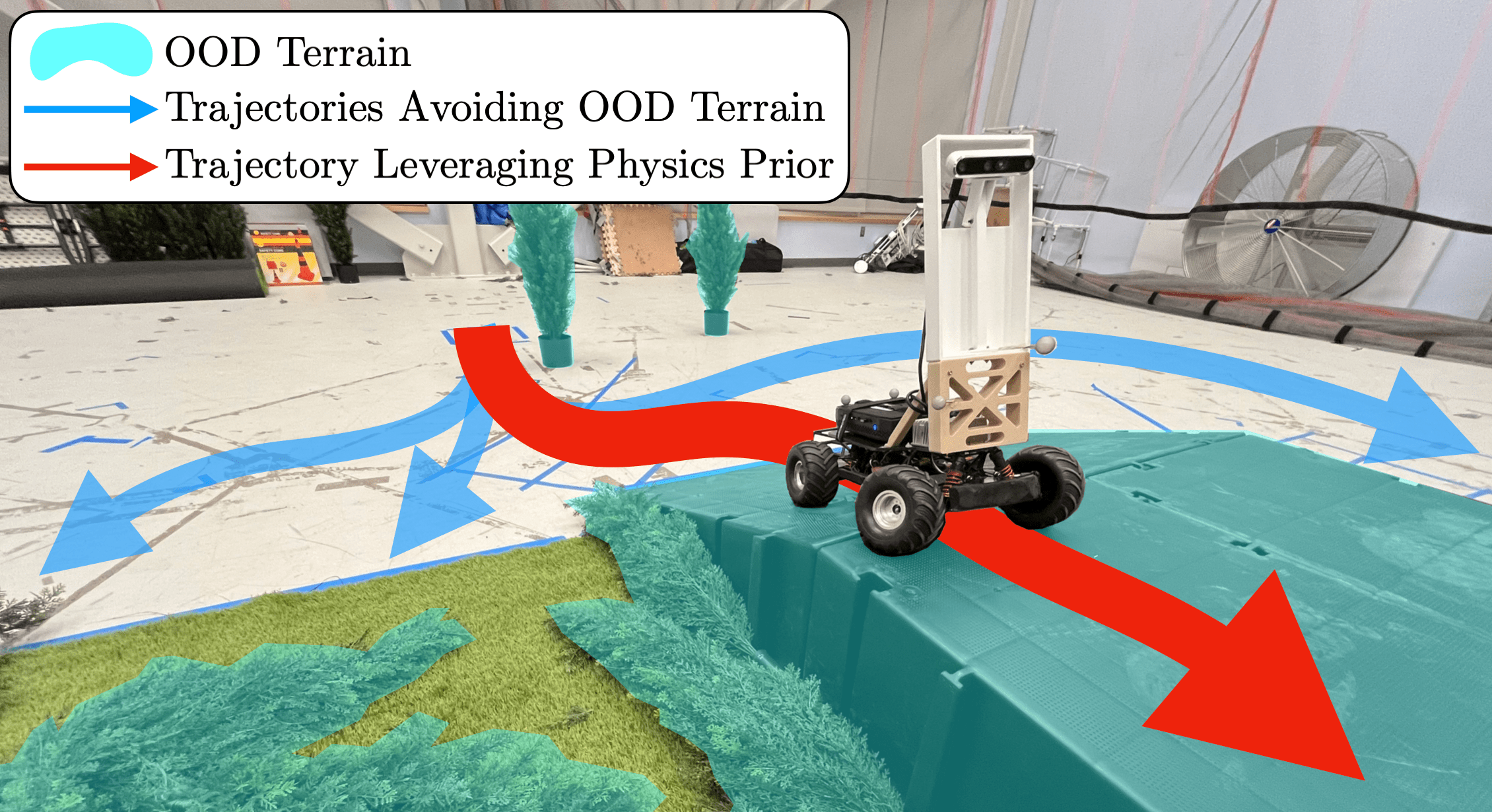
Physics-Informed Evidential Traversability Learning
Xiaoyi (Jeremy) Cai,
Jimmy Queeney,
2025
Incorporating physics knowledge into learned models for traversing out-of-distribution terrain
|

|
Safety and Predictability in Robot Navigation for Last-Mile Delivery
Lakshay Sharma,
Xiaoyi (Jeremy) Cai,
2024
Safety and Predictability in Robot Navigation for Last-Mile Delivery
|

|
Evidential Traversability Learning
Xiaoyi (Jeremy) Cai,
Lakshay Sharma,
Michael Everett,
2024
Uncertainty-aware traversability learning and risk-aware navigation in off-road terrain
|

|
Risk-Aware Mapping and Planning
Lakshay Sharma,
Michael Everett,
Donggun Lee,
Xiaoyi (Jeremy) Cai,
2023
RAMP: A Risk-Aware Mapping and Planning Pipeline for Fast Off-Road Ground Robot Navigation
|

|
Risk-Aware Off-Road Navigation Leveraging Semantics
Xiaoyi (Jeremy) Cai,
Michael Everett,
2022
Use semantics of the environment to infer terrain traversability based on history of speed data.
|

|
Multi-Robot Information Gathering
Xiaoyi (Jeremy) Cai,
Kasra Khosoussi,
2022
Optimizing the trade-off between information and energy cost.
|

|
Lidar-Inertial Observability-Aware Navigator
Andrea Tagliabue,
Jesus Tordesillas Torres,
Xiaoyi (Jeremy) Cai,
Ali-akbar Ahga-mohammadi,
2020
This work presents the Lidar-Inertial Observability-Aware Navigator used at the DARPA Subt. challenge.
|
|
