|
Brett Lopez
Alum
I am a graduate student studying control and planning for autonomous systems that have uncertain dynamics and experience uknown external disturbances.
btlopez [at] mit [dot] edu
|
|
-
Ph.D. in Aeronautics and Astronautics Engineering, MIT, 2019
-
S.M. in Aeronautics and Astronautics Engineering, MIT, 2016
-
S.B. in Aerospace Engineering, UCLA, 2014
|
-
Robust and Adaptive Nonlinear Control
-
Model Predictive Control
-
Collision Avoidance
-
Robot Motion Planning
|
|
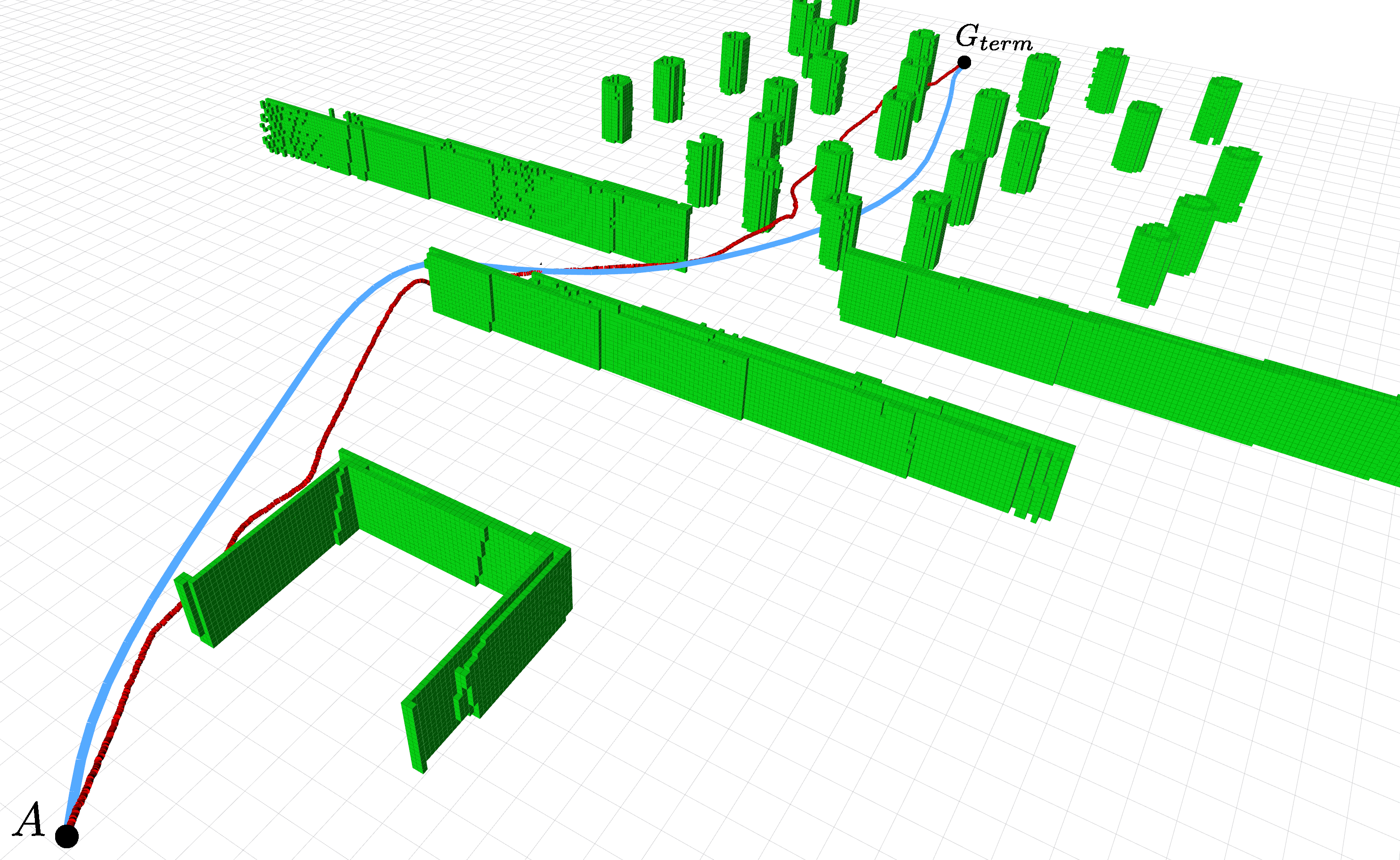
Real-time Planning and Obstacle Avoidance for UAVs
Jesus Tordesillas Torres,
Brett Lopez,
2018
This work proposes a planning framework in which multi-fidelity models are used to reduce the discrepancy between the local and global planner.
|
|
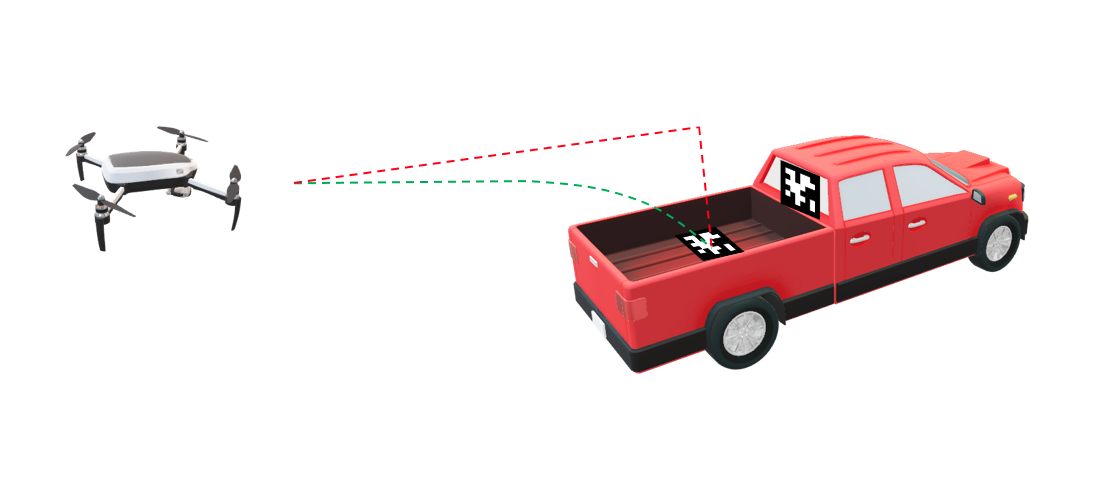
Integrated Drone Station
Aleix Paris,
Brett Lopez,
2018
This project will create effective first/last-mile integrated ground/aerial delivery solutions for a fleet-wide package delivery system.
|

|
Agile Plate Transport with a Hexacopter with Canted Motors
Gabriel Bousquet,
Jesus Tordesillas Torres,
Brett Lopez,
2018
This work proposes the use a Hexacopter with canted motors for precise aerial manipulation tasks.
|

|
Indoor Fixed-Wing Aerobatics
Brett Lopez,
2014
The goal of this project is to emulate an air race in a laboratory setting in the hope of expanding control and autonomy paradigms to compensate for unknown system dynamics.
|
|
