Website / Google Scholar / LinkedIn nrober [at] mit [dot] edu
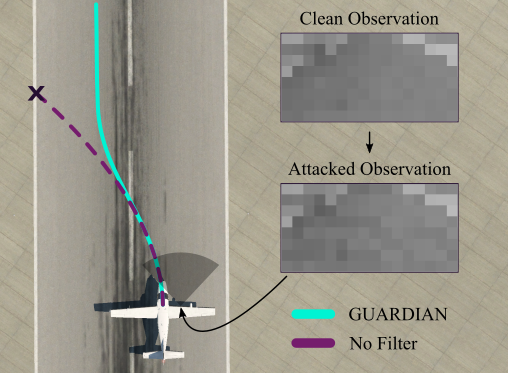
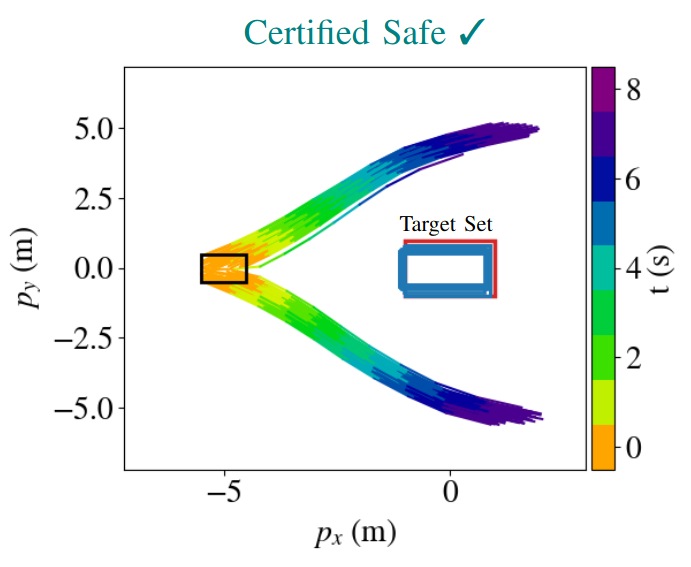
Safety Filtering for Systems with Perception Models Subject to Adversarial Attacks Nicholas Rober, Alex Rose, 2026
This project developed an approach to guard systems with NN-based state estimators from adversarial attacks designed to cause safety constraint violations
Constraint-Aware Refinement for Safety Verification of Neural Feedback Loops Nicholas Rober, 2024
This project developed an approach to reduce conservativeness in reachable set calculations for neural feedback loops
Online Reachability Analysis for Systems Subject to Uncertain Disturbances Nicholas Rober, 2023
This project developed an approach to verify safety for systems subject to unknown disturbances
Backward Reachability for Neural Feedback Loops Nicholas Rober, Michael Everett, 2022
This project developed a backward reachability strategy to certify safety for systems controlled by neural networks