|
Nikita Jaipuria
Alum
nikitaj [at] mit [dot] edu
|
|
|
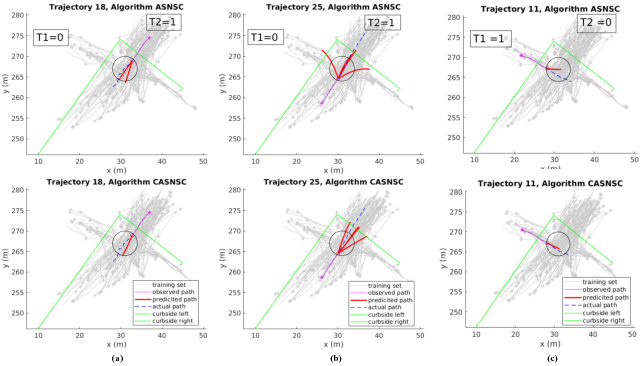
Incremental Learning of Motion Primitives for Pedestrian Trajectory Prediction at Intersections
Golnaz Habibi,
Nikita Jaipuria,
Jonathan How,
2019
This project presents a novel incremental learning algorithm for pedestrian motion prediction, with the ability to improve the learned model over time when data is incrementally available.
|
|
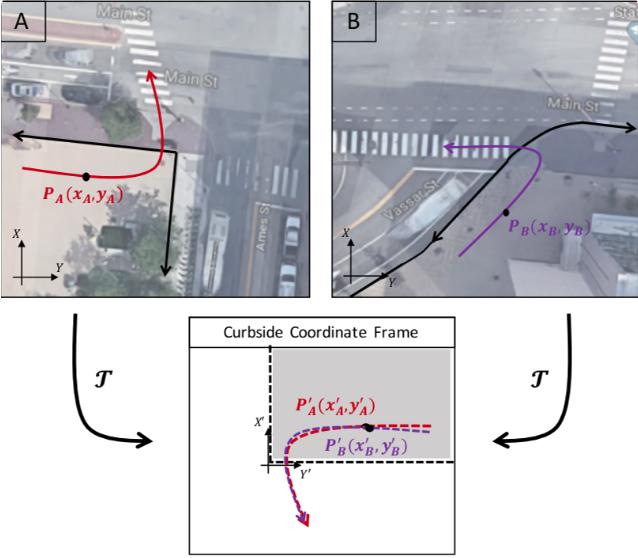
A Transferable Pedestrian Motion Prediction Model for Intersections with Different Geometries
Golnaz Habibi,
Nikita Jaipuria,
2019
This project pursues the development and application of unsupervised and semi-supervised machine learning algorithms to automate exploration of underwater environments.
|
|
Context Based Pedestrian Intent Recognition
Nikita Jaipuria,
Golnaz Habibi,
2018
The objective of this project is to accurately predict pedestrian motion while embedding the environmental context into account.
|

|
Online threat assessment for highway driving scenarios
Nikita Jaipuria,
2017
The objective of this project is therefore to develop an online threat assessment system for highway driving scenarios, with special focus on predicting lane change maneuvers of surrounding traffic, based solely on information available through on-board perception sensors.
|
|