-
M.S. in Aeronautics and Astronautics Engineering, MIT, 2024
-
B.S. in Computer Engineering, BYU, 2022
-
Ph.D. in Aeronautics and Astronautics Engineering, MIT, 2024 - current
|
-
Semantic Mapping
-
Multi-Robot Localization
-
View-Invariant Loop Closure
-
Multiple Object Tracking
-
Global Data Association
-
Flight Controls
|
|
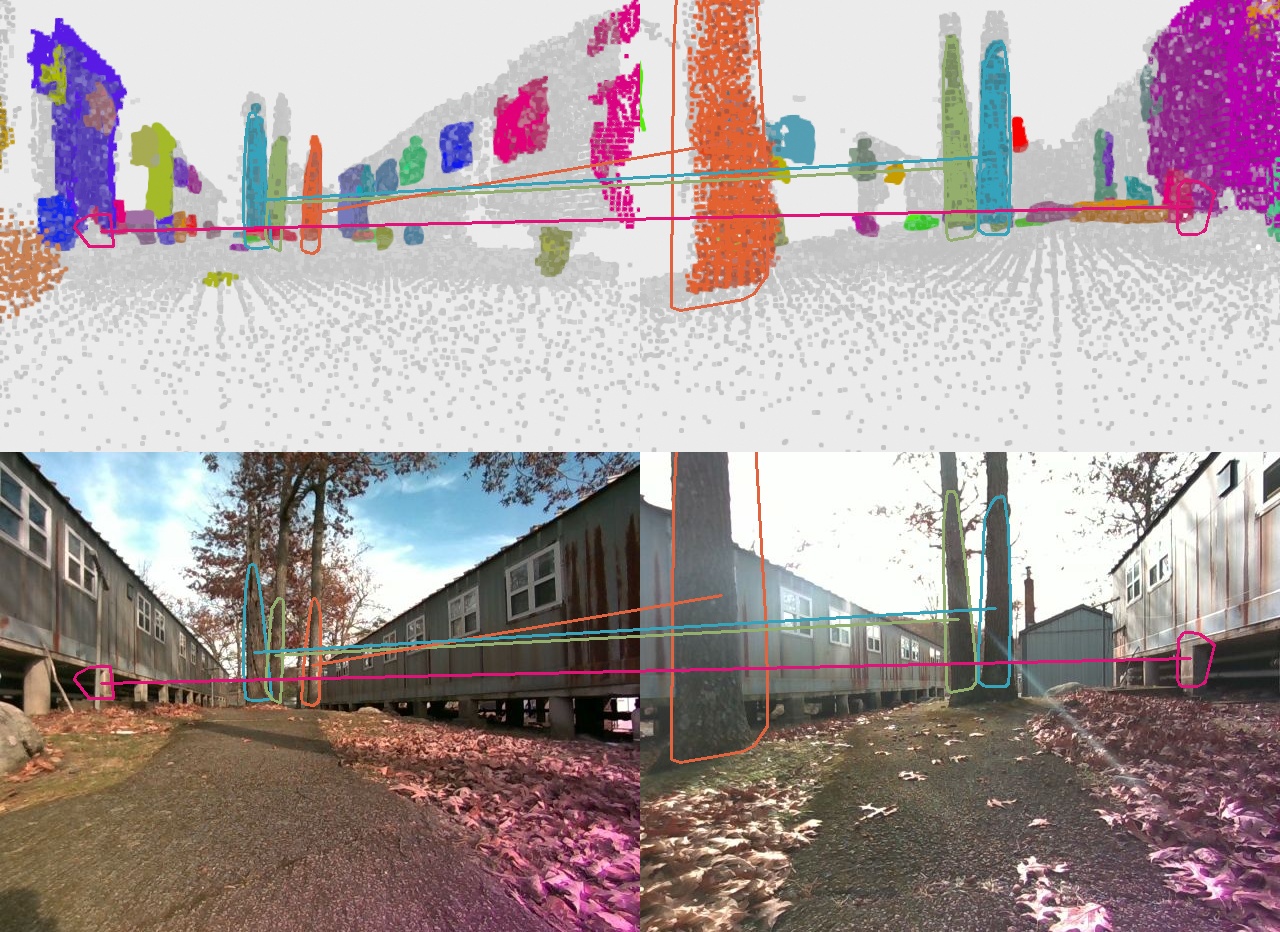
Open-Set Object Mapping and Loop Closures
Mason Peterson,
Yulun Tian,
Yixuan (Lucas) Jia,
2025
This project presents an outdoor global localization method based on robust registration of open-set segment maps.
|
|
