CV / Google Scholar / Website / LinkedIn / GitHub kkondo [at] mit [dot] edu
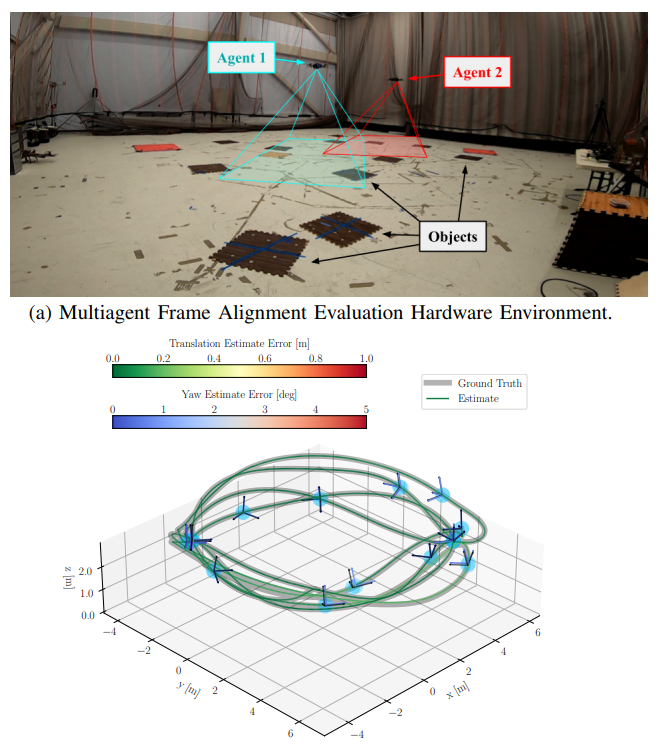
Fully Decentralized Uncertainty-aware Multiagent Trajectory Planner with Real-time Image Segmentation-based Frame Alignment Kota Kondo, 2023
This work proposes a fully decentralized perception-aware, uncertainty-aware multiagent trajectory planner with real-time image segmentation-based frame alignment
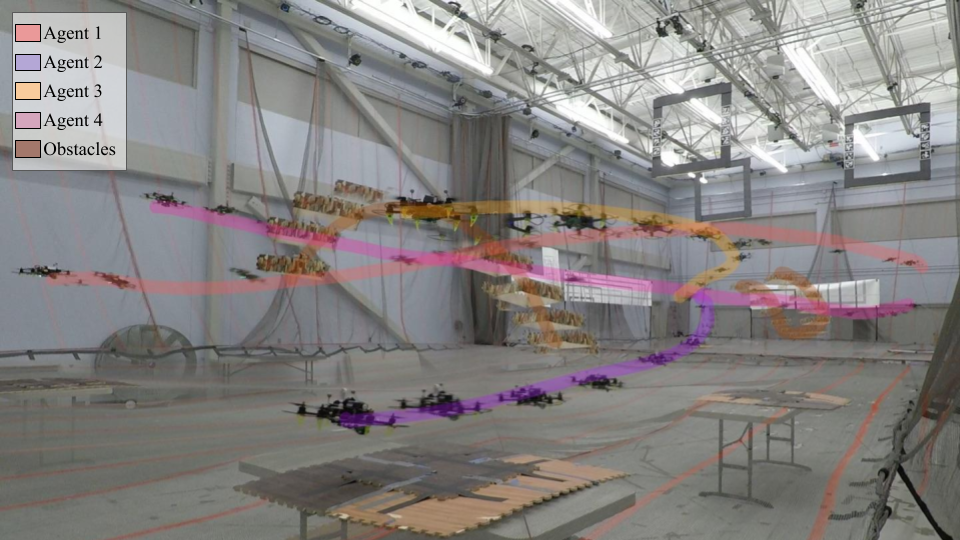
Communication Delay Robust Multi-Agent Trajectory Planning in Dynamic Environments Kota Kondo, 2023
This work proposes a fully decentralized and asynchronous multiagent trajectory planner that is robust to communication delays for UAVs.