Website tdjc [at] mit [dot] edu
Truncated Bayesian Nonparametrics Trevor Campbell, 2016
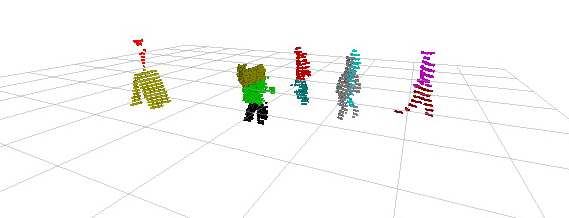
The objective of this project is to accurately predict pedestrian motion while embedding the environmental context into account.